 |
 |
 |
 |
 |
 |
 |
 |
Empujador de Submarinos de la Armada de los Estados Unidos "Orianita"
Por Alejandro M. Di Loreto
El buque real
Aquel que me conoce, sabe que soy un adepto a miniaturizar las "cosas", y es por ello que estuve algún tiempo buscando una "victima", a la cual, someter.
Visitando un día las librerías de la calle Corrientes, pleno corazón de la Ciudad de Buenos Aires, di con un ejemplar del libro "Silent Chase", de Thomasson Grant, de la librería del Congreso de los Estados Unidos, impreso en Japón en 1989.
En realidad adquirí este libro por la sencilla razón de que soy bastante adepto a estos, y no precisamente para la construcción del modelo que les presento. Después de "morar en mi biblioteca dos o tres años", hojeándolo como otras tantas anteriores veces, fijé mi atención en dos fotos en la cual "posaba mi victima" (para referencia, las mismas se ubican en las páginas 142 y 144, de citado libro).
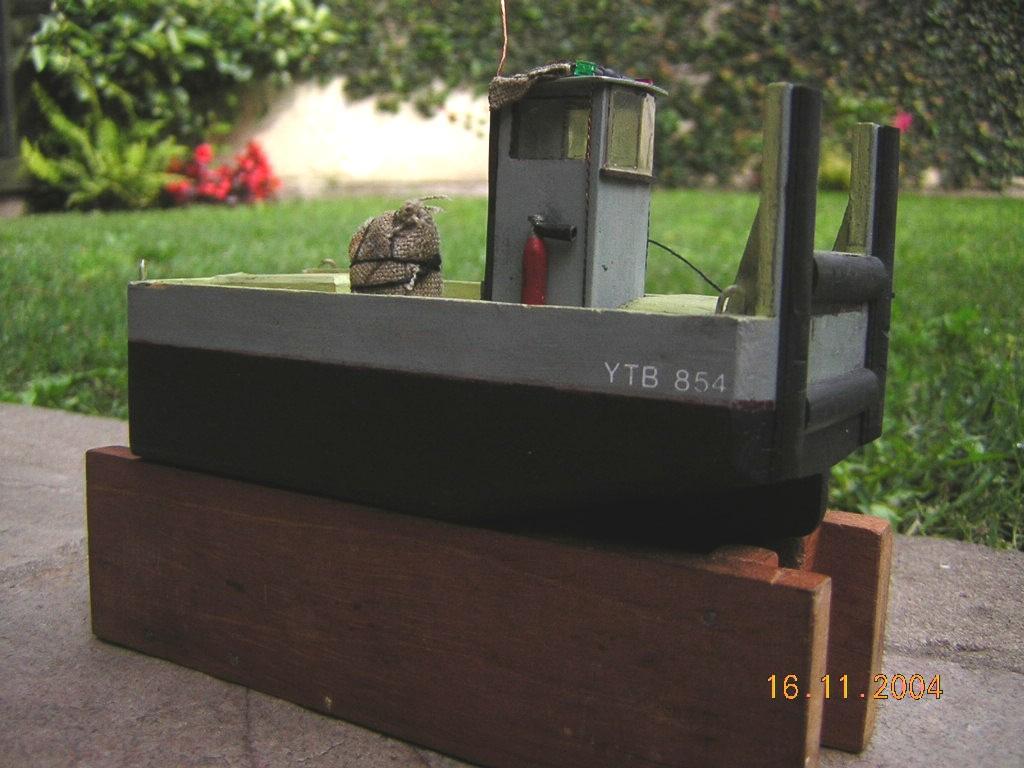
Se trata de un empujador, utilizado en la base de submarinos situada en Bangor, que pertenece a la U.S. Navy y del cual realmente no poseo (ni poseí), datos técnicos, planos, ni nada como para realizar su construcción a escala, excepto las dos fotos mencionadas con anterioridad, ya que las mismas muestran un entorno bastante bueno como para dar una idea de las medidas (por Ej. un salvavidas colgado a un lado de la cabina, o la puerta de acceso a la misma), y además en una de ellas, se ve a dos tripulantes a bordo del empujador, y es en ellos que basé centralmente, mi construcción y escala. De todo esto resultó que la medida aproximada de su eslora y manga (de ahí en adelante para mí, definitiva), resultaba de 5.80 metros y 2.65 metros respectivamente, y de ahí decidí su escala de 1:50. Dando rienda suelta a la "lógica general", supuse que debería de tener un potente motor, para "pechear" un submarino, adosado a una generosa tobera, un equipo de radio y demás elementos "de uso obligado en toda embarcación" (cabos, luces, bocinas, matafuego, etc., etc.).
El modelo
Esta construido íntegramente en madera balsa de 2 milímetro y resina epóxi, y pintado con esmalte sintético. Utilizo un pack de 4,8 Volts de pilas de Ni-Mh de 650 mA, del cual alimento receptor y motor. El receptor es un Futaba de 2 canales de AM, al cual le hice una "lipoaspiración", y le quité los "excedentes", y el motor que lo impulsa es el de un servo standard de 3,5 Kgrs., al que le adosé un resorte de los que traen los retenes para automóvil, culminando en una pieza torneada con rosca, para la sujeción de la hélice. El regulador de velocidad, es una plaqueta de servo, modificada en algún componente y la tobera la construí con un caño de aluminio y masilla tipo Poxilina, colocándole en el centro un buje de cobre para guía del eje, a su vez esta es movida por un servo de los utilizados en las alas de los aviones RC, de 6 grs. de peso, el que también fue sometido a "lipoaspiración". La iluminación de posición, la realicé con dos led´s de los de superficie (2 x 2, 7 milímetros), y la del interior de la cabina, con una lámpara incandescente de 1,5 volts.
Eso es todo amigos, y espero haberles sido útil.
Alejandro M. Di Loreto
|
|
|
|
|
|
|
|