Construcción de un sencillo modelo de submarino con inmersión estática
El objetivo de este artículo es presentar al modelista naval la posibilidad de construir un modelo relativamente sencillo de submarino RC con sistema de lastre dinámico, sin complicado sistema de lastre estático, es decir, que se sumerje con acción del motor y planos de profundidad, volviendo a la superficie al detenerse.
Este artículo es traducido de uno publicado en la revista Marine Modelling International, en una de sus entregas especiales, dedicada a los submarinos RC. Aquí va:
Por Hal Harrison
Mientras algunos modelos nos
brindan gran satisfacción al navegar, un modelo de submarino
crea además una cierta exitación si no algo de temor. Hasta
ahora mis aventuras submarinas no me han causado temor pero
admito cierta taquicardia cada vez que mi modelo se sumerje. Esto
me obliga a ser más precavido, pues el exceso de confianza a
causado la pérdida de varios submarinos RC.
Teniendo en cuenta el tiempo y el dinero invertido en estos
modelos dudo que alguna vez me aventure más allá de las
cristalinas y seguras aguas de una piscina. Por suerte mi primer
submarino RC era muy simple y de inmersión dinámica: para
sumergirse accionaba el motor y la fuerza del agua sobre los
hidroplanos lo sumergian, cortando motor para que luego volviese
a la superficie.
Luego de una temporada
navegándolo llegué a la conclusion de que, comparado con un
costoso submarino de inmersión estática, con el mio obtenia al
75% del disfrute por quizá el 10% del costo de uno más
complejo. Inspirado en viejos diseños anteriores a los
nucleares, cuyo casco cilíndrico ponia a prueba mis habilidades,
me decidí por un diseño basado en los clase O/P de la Royal
Navy.
La forma del casco es una sección central estanca, mientras que
en la proa y popa, estas secciones son inundables. Habida cuenta
de lo alta de la vela es algo lento en inmersión, pero esto no
es un serio problema.
Un temor común entre
modelistas es el hecho de que el modelo deberá soportar las
presiones submarinas que, como ya hemos visto en películas de
guerra, desde una pequeña fuga de agua hasta un torrente
imparable, pueden condenar definitivamente al barco y su
tripulación. No obstante nosotros navegamos a poca profundidad
de manera que nuestros diseños pueden ser bastante más simples
que los reales. La esfera es el cuerpo que mejor resiste las
presiones, pero es impracticable para aplicaciones militares, por
ello los modernos submarinos son cilíndricos con extremos
redondeados. Una "caja" como la que pensamos construir
aclaremos que es efectiva a poca profundidad.
Asimismo, el acceso al interior no debe ser una proeza de
ingenieria habida cuenta de la poca presión que deberia
soportar: dos superficies planas con una delgada capa de grasa
entre ellos deberia asegurarnos la estanqueidad deseada.
En cuanto a las conexiones mecánicas de varillajes de servos y
eje de hálice pueden ser resueltas, siempre teniendo en cuenta
nuestras modestas espectativas, con tubos telescópicos con capa
de grasa en medio de ellos, como ser, de un mm de diferencia
entre ambos diámetros, eje y bocina.
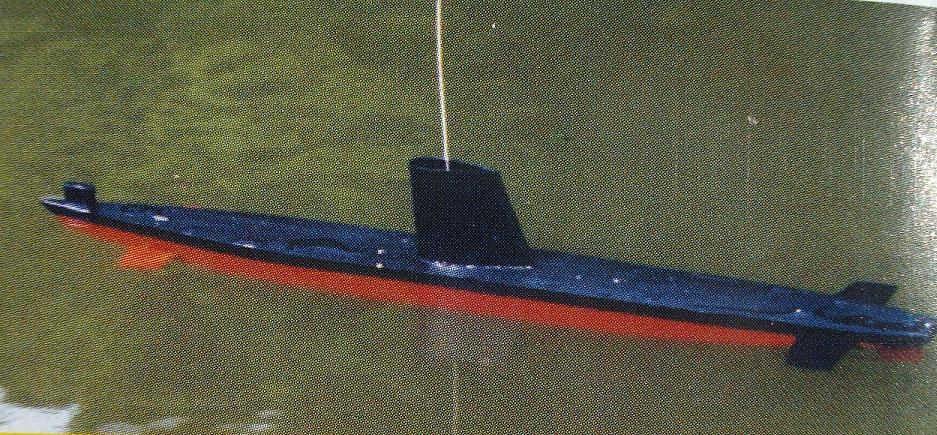
La antena corre por dentro de un tubo plástico sellado verticalmente dispuesto sobre la vela, de manera de asegurarse la recepción y como referencia para saber por dónde anda mi modelo.
Construcción del casco
Utilizo contrachapado de 2 mm. Dos laterales idénticos (uso el primero como plantilla para el segundo). Los 2 mamparos que forman a caja estanca junto con los laterales, son de contrachapado de 3 mm. Los orificios para la bocina de hélice y varillaje de servos pueden hacerse ahora, siempre y cuando esté seguro de sus posiciones definitivas.
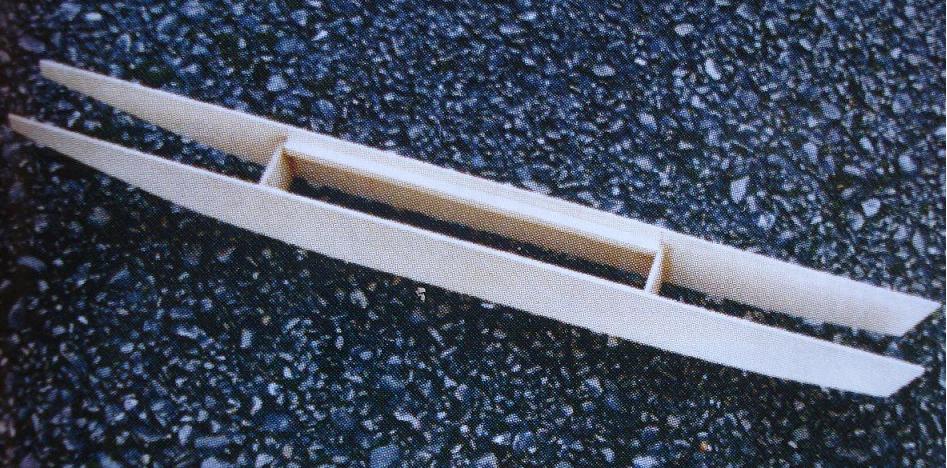 Podemos iniciar el casco pegando los laterales a los mamparos que
cierran el compartimiento estanco.
Podemos iniciar el casco pegando los laterales a los mamparos que
cierran el compartimiento estanco.
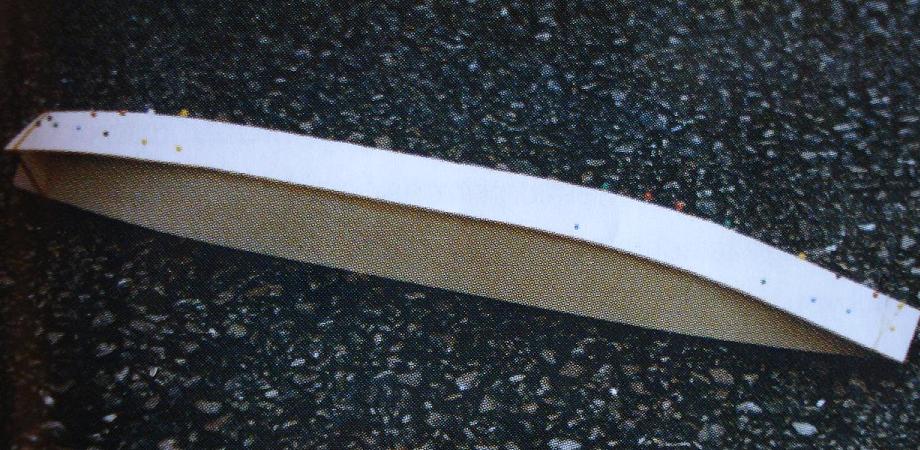
 Pegamos el fondo con una plancha sobre
medida, de manera de luego eliminar el sobrante.
Pegamos el fondo con una plancha sobre
medida, de manera de luego eliminar el sobrante.
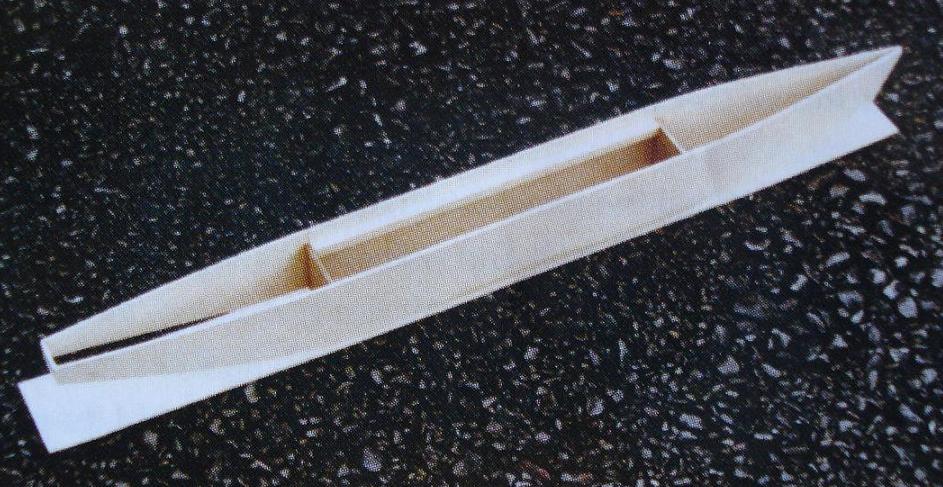
Dos tiras de 10mm de contrachapado se adhieren uniendo los mamparos, todo alineado para asegurarnos la base donde apoyará la tapa del cilindro estanco, cuya base es el rectángulo formado por los 2 mamparos y estas 2 tiras. Cuando esto fragüe, unimos los laterales para cerrar la proa. El fondo del casco lo logramos con contrachapado cortado sobremedida, de manera de luego ir cortando el sobrando y ajustándolo con lija. La popa la cerramos con un trozo o bloque de balsa.
Conviene reforzar la proa con tiras de madera colocadas por dentro. Adherimos un pequeño trozo de contrachapado de forma triangular sobre la proa, esto nos ayudará a fijar la cubierta removible. Practicamos los orificios donde hacemos las ranuras en las que se colocarán los planos de popa fijos: aquí debemos prestar atención al alineamiento. Estos planos los hacemos en contrachapado de 3mm. Practicamos además un par de orificios en el fondo de los compartimientos de proa y popa inundables, a fin de permitir al agua ingresar fácilmente. No olvidarnos de los orificios para los ejes de los planos funcionles de proa.
 Una vez fraguado lo anterior damos la forma definitiva clavando
los laterales hacia proa y popa.
Una vez fraguado lo anterior damos la forma definitiva clavando
los laterales hacia proa y popa.
 Aqui vemos la bocina de hélice y el soporte del timón. También
se aprecian los planos de popa fijos.
Aqui vemos la bocina de hélice y el soporte del timón. También
se aprecian los planos de popa fijos.
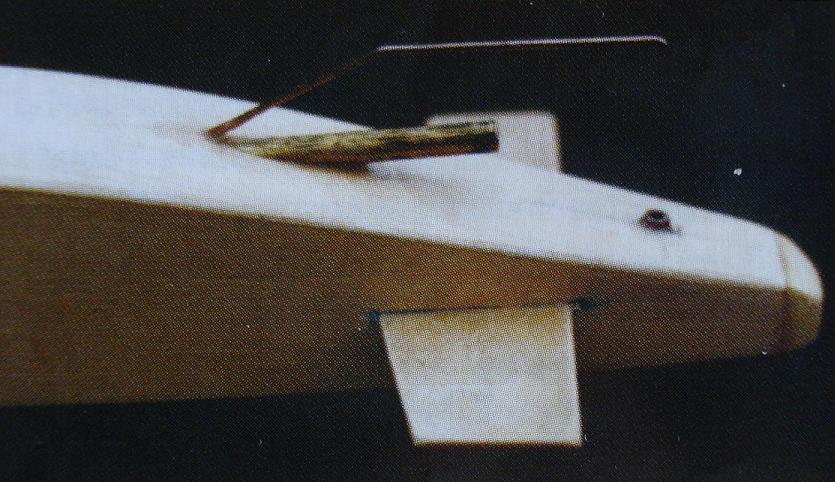
 Aquí vemos los planos de proa y el varillaje hacia el
compartimiento estanco, como así también lastre fijo. Esta zona
que vemos en la proa es inundable.
Aquí vemos los planos de proa y el varillaje hacia el
compartimiento estanco, como así también lastre fijo. Esta zona
que vemos en la proa es inundable.
 La sección de popa con el varillaje de timón,los planos fijos y
el lastre.
La sección de popa con el varillaje de timón,los planos fijos y
el lastre.
Motor y eje de hélice
Usando los planos como referencia, hacemos la ranura en el fondo por donde pasrá la bocina de hélice, que una vez alineada fijaremos con epoxy. Para el motor podemos perfectamente utilizar un tipo 385, que montaremos al fondo del casco con un adecuado trozo de madera, que iremos ubicando en distintas posociones hasta dejar perfectamente alineado el motor con la bocina.
Timón
Como el tubo de timón es muy corto decidí hacer un soporte con alambre en el fondo del casco. El timón es planchas de aluminio adheridas con epoxy al eje de timón. Debido al poco espacio dentro del casco utilizé un brazo de plástico que fui recortando para poder moverse sin tocar los laterales del casco.
Hidroplanos de proa
Para facilidad de instalación y poder quitarlos cuando lo necesite, hice los hidroplanos en 2 piezas que uno con un brazo combinado de control y conector. Los hidroplanos son plancha de aluminio adheridos con epoxy a sus ejes. Los tubos son de la medida telescópica siguiente a estos ejes. Estos tubos son de corta longitud para tener así algo más de espacio para el conector de planos.
Sellando el casco
Es necesario impermeabilizar todas las superficies de madera expuestas al agua. Aquí puede usarse epoxy, barniz, dope, a gusto del "cliente". No es necesario sellar el interior del compartimiento estanco.
Cubierta removible
Para evitar excesiva fuerza de flotación al sumergirse, la cubierta y vela las hice de estireno de 1mm. Como se veia demasiado flexible adheri debajo 3 tiras para mayor refuerzo. Toda la cubierta debe ser perforada con pequeños orificios a fin de permitir que el aire salga rápidamente al iniciar la maniobra de inmersión.
La vela se hizo doblando planchas de plástico muy delgado copiando el contorno en plantilla que puede ser en madera y plástico, luego adheridas. Una vez armada se adhiere a la cubierta, justo rodeando el orificio por donde saldrá el tubo de la antena.
Tapa
La tapa puede ser plástico
transparente de 2 a 3 mm, cortado copiando la base donde
apoyará. Con 8 a 10 tornillos, que deben atornillarse a la
madera habiendo practicado previamente los orificios de medida
algo menor. No debemos excedernos con la fuerza al atornillar,
simplemente deben fijar la tapa contra la madera.
Para la antena adherí, habiendo pasado por un orificio en la
tapa, un tubo de plástico sellado en el extremo superior, por
este tubo paso el cable de la antena. En mi caso es de unos 30cm
de largo, que si bien no coincide con la longitud orginal de la
antena, al menos por experiencia aprendí que estando un trozo de
la misma verticalmente dispuesta, la recepción está asegurada.
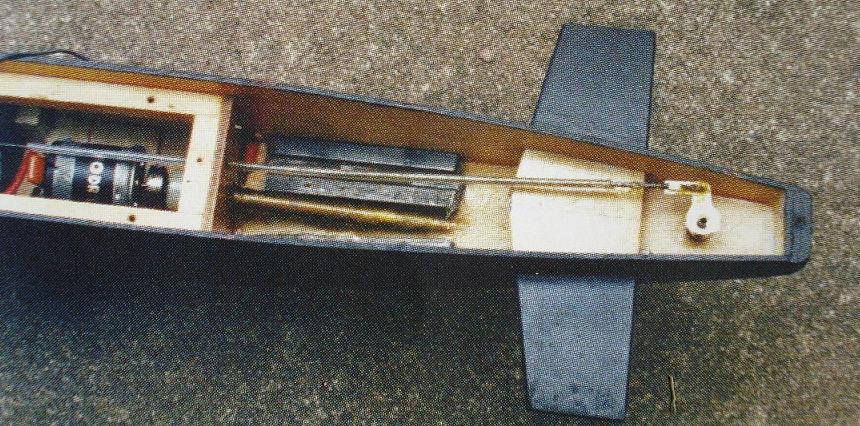
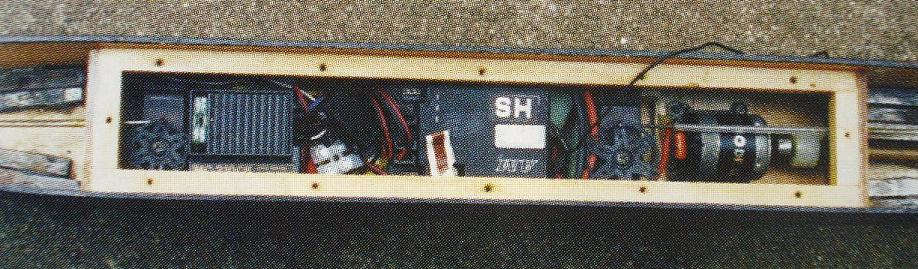 Aquí vemos en la caja estanca todo el equipo de radio y
motorización.
Aquí vemos en la caja estanca todo el equipo de radio y
motorización.
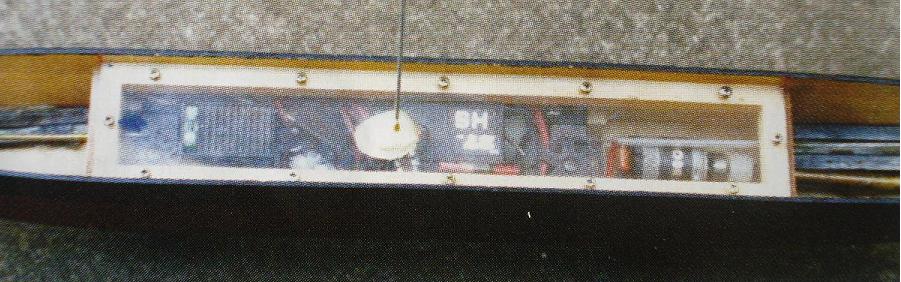 La tapa transparente sellando el compartimiento estanco.
La tapa transparente sellando el compartimiento estanco.
Pintura
Podria haberlo pintado todo de negro, pero consideré que mejor dejar el casco en rojo desde la línea de flotación, lo cual ayuda a divisarlo bajo el agua. Chequeamos bien que no queden poros sin impermeabilizar.
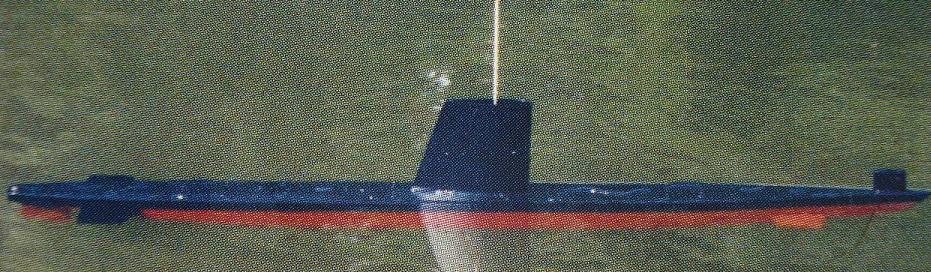
 Aqí lo vemos finalizado y pintado.
Aqí lo vemos finalizado y pintado.
Equipo de radio
Los servos deben ser posicionados de manera que el timón y los planos de proa puedan ser accionados a través de varillas que pasen por los tubos adheridos a los mamparos, de popa y proa respectivamente. Conviene haberlos hecho antes de montar los mamparos entre los laterales del casco. Los tubos plásticos deben ser adheridos con abundante epoxy. Los servos atornillados a tiras de balsa, luego adheridas al casco. El servo de planos de proa es instalado detrás del mamparo de proa mientras que el de timón, delante del motor. Las varillas deben operar 100% seguras. Los tubos con rellenados con grasa antes de pasar las varillas.
Podemos instalar el variador y receptor sobre el pack de baterias. Para evitar que estos items se desplacen dentro del casco podemos rellenar el interior con foam.
Ajustes y pruebas
Los primeros tests los haremos
en la bañera en casa, nunca por vez primera en el lago! Antes de
atornillar la tapa una tira de grasa fue colocada a modo de
sellante.
Lo bueno de usar una tapa transparente es que nos permite
visualizar como se esparece la grasa, y eventualmente alguna via
de agua. Sin la cubierta, hundimos el sub en la bañera con ayuda
de algunos plomos y lo dejamos (siempre vigilándolo) unos 30
minutos. Mientras no tengamos 100% de efectividad, no se aconseja
salir a navegar el sub.
Para ajustar el peso, o trimming, del modelo, se necesitaron
barras de plomo repartidas experimentalmente entre los
compartimientos inundibles de proa y popa. En total resultó un
modelo de 1.5kg. La idea era que selogre sumergir con acción del
motor y planos, para lo cual se necesitó que la cubierta quede
apenas sobre el agua.
Preparaciones antes de navegar
El equipo de radio debe ser
100% confiable, los servos y el varillaje deben operar ded manera
correcta. Puede que algo de grasa aparezca por los extremos
interiores de los tubos, para ello coloco algún pequeño frasco
que recoja esa grasa.
Con los planos en posición horizontal el modelo navega por la
superficie, quizá con alguna tendencia a bajar la proa.
Experimentando encontré que con unos 5 grados de ángulo
negativo de los planos de proa, el modelo puede ser llevado bajo
la superficie.
No es difícil con algo de práctica llevarlo con la antena apenas fuera del agua. En caso de que esta desaparezca de vista, basta con aplicar reversa y el modelo subirá como una boya. El diseño es tal que a pleno motor bajo el agua, durante un viraje se inclina como un avión actuando sobre los alerones. Esto lo provoca el momento del timón de deriva que está bajo el centro de masa.
Los submarinos RC de inmersión estática, además de la ventaja de la seguridad, suelen ser más estables para pilotear habida cuenta de que una vez alcanzada la velocidad de inmersión, mientras no la variemos, se mantienen a la misma profundidad.
En cuanto al tipo de transmisor, depende del gusto de cada uno. Usar una misma palanca para timón y profundidad puede ser tedioso, por eso uso una radio de 2 palancas, con una controlo los planos de proa y con la otra el timón. Un tercer canal tipo perilla permite fijar y sostener el régimen del motor.
Los submarinos aun son cosa fácil !
Todo depende de lo que estemos dispuestos a gastar y lo que pretendamos de un submarino RC. No olvidemos que otro modelo de barco RC puede permitirnos ciertos errores, y hasta podemos esperar que vuelva a la orilla en caso de problemas, pero el caso de los submarinos nos obliga a ser mucho más cuidadosos.
Que subas a la superficie tantas veces como te sumerjas!
Hal Harrison