




Micro
Submarino Explorador SEV 1
Por Roberto Villaverde
Francamente nunca pensé que algún dia iba a construir un submarino RC, habida cuenta de la implícita complejidad de dichos modelos. Sin embargo, una idea me daba vueltas en la cabeza desde hacia tiempo y era nada menos que construir un mini submarino explorador, de diseño propio, utilizando como casco algún tubo de PVC o envase de algún producto que perfectamente pudiese adaptarse.
La idea involucraba también la miniaturización del sistema RC, cosa que económicamente no es accesible; pero fuera del mundo "purista" RC, encontramos por doquier, y a precios razonables, distintos modelos de juguetes RC en distintas versiones: motos, autos, lanchas, hasta submarinos!
Pensando en poder no solamente avanzar y retroceder, sino también, ascender y descender, debia utilizar al menos 3 motores: 2 para empuje y dirección, y el 1 vertical para ascenso/descenso, obviamente gracias a flotabilidad levemente positiva.
Por ello, adquirí 2 micro lanchas de juguete a RC, puesto que cada equipo de radio comanda 2 motores (uno de ellos obviamente en mi caso seria para el motor vertical).
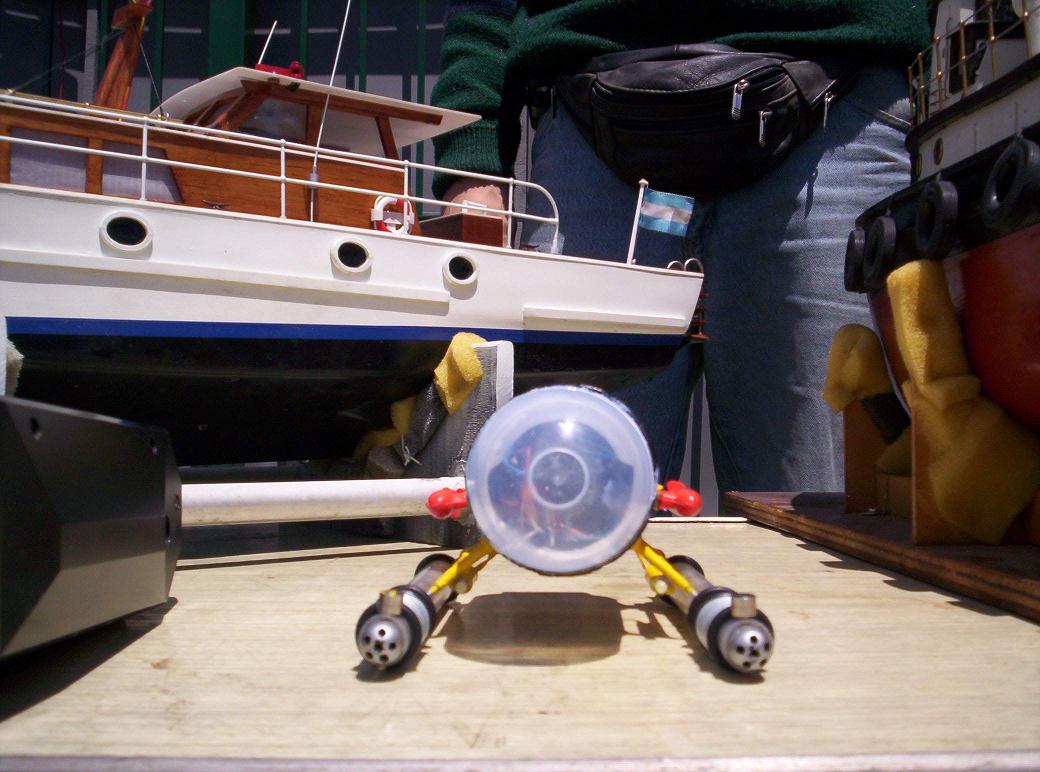
Como envase, luego de mucha búsqueda, dí con un desodorante a bolilla (roll-on) para mujeres, en la sección perfumeria de un supermercado. Las patas de apoyo, son 2 tubos plásticos transparentes de sifón de soda descartable, dentro de los cuales ajusto mediante pequeños trozos de alambre de acero inoxidable, la flotabilidad positiva. Habia intentado con munición pero no era inoxidable y mejor ni les cuento el resultado; tampoco quiero utilizar plomo debido a su potencial contaminación. Utilizando puntas de bolígrafos con rosca, puedo fácilmente agregar o quitar los trozos de alambre para variar su lastre.
Además, gracias al avance de la técnica en construcción de potentes LEDS, utilicé 3 para iluminación externa (2 hacia adelante y uno hacia abajo), más un cuarto led rojo interminente en su parte superior.
Toda la alimentación la obtengo de un pack de 3 pilas de NiMH, 3.6 volts, ya que dichos leds no encienden con menos de 3 volts. Pero debí intercalar 2 diodos en serie para bajar la tensión a menos de 3 volts en la alimentación de los pequeños receptores RC, ya que normalmente se alimentan con aprox. 2.4 V.
Comencé por una mano de lija fina en el exterior e interior del envase, previa eliminación de la bolilla y el contenido; debo admitir que mi taller quedó algo perfumado durante unos dias. Luego todas las perforaciones: 2 para los motores de empuje, 1 para el tubo vertical de 15 mm que contiene el motor vertical, 1 para el led superior, 2 para la salida de los cables de leds, y 4 para los brazos de las 2 patas de apoyo. Cada perforación luego fue sellada con epoxy por fuera y por dentro, agregando silicona en el interior.
Para sellar la rosca de la tapa translúcida, que hace las veces de cúpula, agregué grasa siliconada y un o-ring plano: garantizo que hasta 50 cm de profundidad funciona, y seguro más también, pero como los motores utilizados son de lanchas, no están pensados para presión, y no quisiera estropearlos.
El motor vertical, como decia, está anclado dentro de un tubo de unos 15mm de diámetro interno, de plástico. Le hice una micro bancada en expoxy, y lo "bañé" en exte producto para asegurarme estanqueidad, sobre todo en la acometida de cables del mismo.
Respecto de estos sistemas de RC, verdaderos "micro" sistemas, hay que manipulearlos con cuidado: los cablecillos son muy frágiles para no mencionar los puntos de soldadura. Previendo problemas, decidí observar detenidamente cada receptor y dibujar lo más aprox. posible el esquema de soldadura, previa identificación de cada cable, por si acaso alguno se desprendia y debia repararlo (como si fuera fácil soldar en estas micro placas!). Luego, sobre la placa, y concretamente sobre los puntos de soldadura de los cables, coloqué abundante epoxy, "abrazando" los cables: de esta manera, minimizo la posibilidad de desoldar alguno. Luego, pude pelar y resoldar los cables sin tanto temor. Debo aclarar que en total, debí soldar unos 20 cables dentro de un volumen de 7 x 4 x 3 cm.
Otro detalle que cuidé era no tener que abrirlo y cerrarlo cada vez que queria ponerdo en funcionamiento o apagarlo fuera del agua, entonces me vino a la mente uno de esos interruptores magnéticos que se utilizan como sensores de apertura de ventanas en sistemas de alarma. Dentro del casco va el interruptor propiamente dicho con los 2 cables, que se intercalan en el circuito de baterias, por fuera, un trozo de plástico (que ni idea de donde vino) me sirvió para adaptarlo como base de anclaje del imán que apenas lo acerco, enciende los sistemas de radio e iluminación.
Pintura en aerosol y 3 manos de barniz marino culminaron el modelo, que no supera los 12 cm de eslora (el casco es de apenas 7 cm.). El texto con el nombre, SEV 1 (Submarino Explorador Villaverde 1), lo imprimí en una transparencia con impresora a chorro, adherida sobre la pintura, y por arriba un trocito de cinta para embalar, para protejer la tinta (el barniz la diluye); arriba de todo vino el barniz.
Respecto de la señal bajo el agua, la solución vino en la forma de 2 cables de unos 150 cm, que con ayuda de sendos "cocodrilos" como los que se usan en testers de electrónica, acoplo a las antenas en un extremo, y el otro sumerjo en el agua, con un plomito para que se sumerjan. Santo remedio!. Inicialmente ambos cables de antena (recordemos uso 2 equipos de radio) quedaron adheridos por debajo del casco, pero encontré que esto me daba problemas de recepción del equipo de motores de empuje, en 40 mhz; el del motor vertical, es en 49 mhz. Por ello corté este extremo, y respetando la longitud original, lo dejé plegado (no enrollado) dentro del casco.
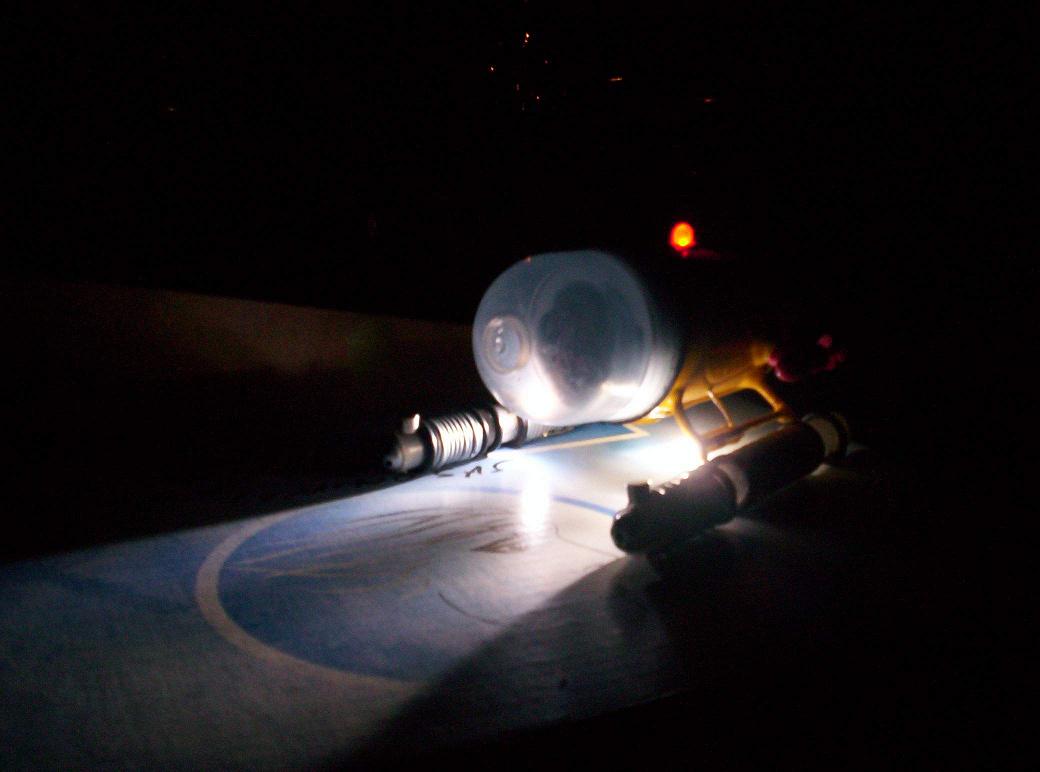
En cuanto al desempeño en el agua, hay que verlo para apreciar lo que se experimenta al poder controlarlo en todas las dimensiones del movimiento, claro que utilizando los 2 transmisores, pero siendo pequeños, no resulta nada incómodo. Aunque en plena oscuridad, con todas sus luces encendidas, realmente es indescriptible el realismo que brinda.
El único aspecto negativo que debo comentar es que debido a la poca fuerza que provee el motor vertical, sumado a su hélice original de mal desempeño (después de todo viene de un juguete de superficie!), para lograr sumergirlo debo lograr una flotabilidad infinitesimalmente positiva, lo cual lleva algunos minutos jugando con el lastre; no olvidemos que varios factores alrteran la flotabiliad de un cuerpo en un líquido: temperatura, salinidad, dureza del agua, etc.
Aun no tengo el soñado estanque con peces y plantas, pero les aseguro que lo que me divierto en la pecera (sin habitantes) de 120 litros bien valió la pena el esfuerzo.
Saludos.
Roberto Villaverde
Click sobre las imágenes pra ampliar.
| |
En mi mano puede apreciarse su tamaño. |
| |
Hacia popa, puede verse la base de anclaje del interruptor magnético. |
| |
Proa. |
| |
Aquí vemos la hélice vertical, para control de profundidad. Los anillos de alambre son para lastre adicional hacia la proa, para nivelarlo horizontalmente. |
| |
|
| |
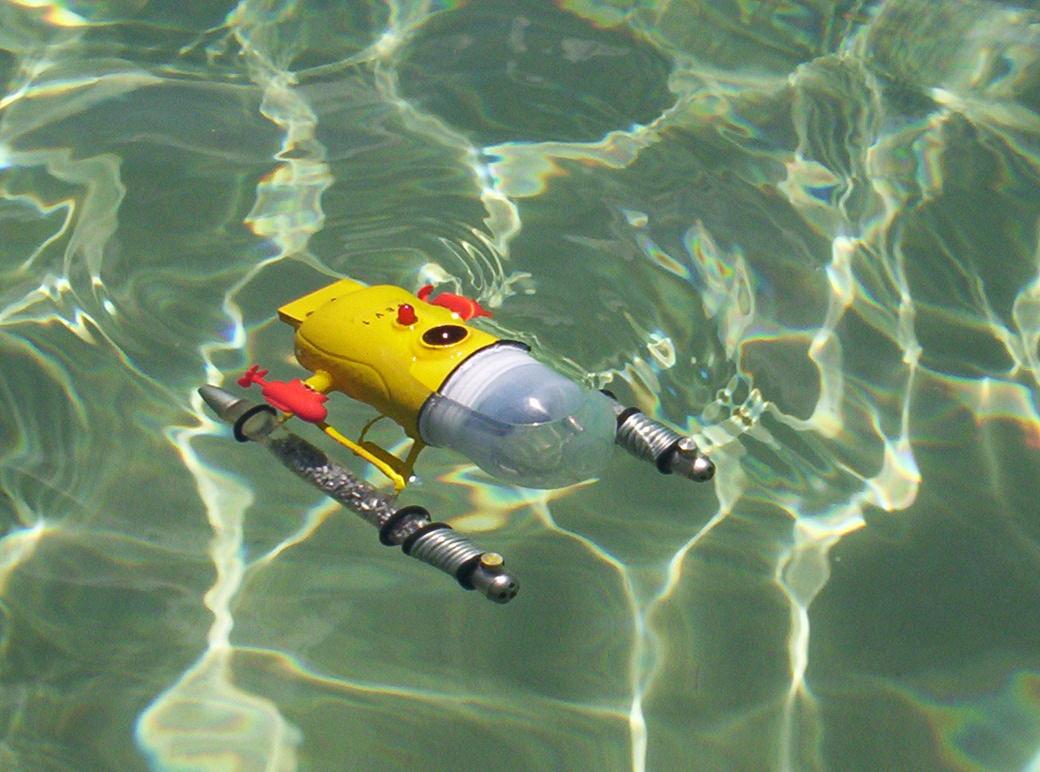
En el agua. |
| |
Luces: 2 leds blancos hacia adelante, 1 hacia abajo y un led rojo titilante hacia arriba. |
| |