Sistema de lastre híbrido para submarinos RC
Por Roberto Villaverde
Sistema de lastre híbrido.
El tipo de submarino RC, en función del sistema empleado para
sumergirlo, puede ser: dinámico, estático o híbrido. Antes de
adentrarnos en el análisis, digamos que de ninguna manera se
pretende influenciar en la elección por parte del modelista,
sino simplemente brindar información al respecto, para que todo
interesado decida, en función de su capacidad técnica,
espectativas y grado de riesgo, qué sistema implementar en su
modelo de submarino RC.
DINAMICO (o sistema de inmersión dinámica): el modelo no tiene
en realidad capacidad para variar su desplazamiento, es decir, no
posee tanque de lastre; para sumergir al submarino, es necesario
accionar el empuje del motor y los planos de profundidad. Por tal
motivo, el modelo debe ser convenientemente lastrado con peso
fijo para que la maniobra resulte posible.
Ventajas: el más sencillo de todos, ya que no es necesario
construir sistema de lastre alguno. Además, el modelo vuelve a
superficie al no accionar el motor, ya que su flotación es
positiva, lo cual es en sí mismo una medida de seguridad.
Desventajas: la inmersión solo puede hacerse a gran velocidad,
nunca de manera estática (sin velocidad horizontal), quitando
realismo, además y fundamentalmente, el modelo, en superficie,
debe estar ya bastante lastrado para permitir la inmersión, lo
cual no refleja la correcta línea de flotación en superficie.
La falta de realismo es su gan desventaja. En función de cuan
positiva es la flotación del modelo, al cortar motor sube a
superficie "como una boya".
ESTATICO (o sistema de inmersión estática): el modelo posee la
capacidad de variar su desplazamiento cargando agua en un tanque
o tanques de lastre, imitando el funcionamiento de un verdadero
submarino.
Ventajas: el realismo es total, permitiéndose incluso lograr
flotabilidad negativa y realizar la maniobra de
"bottoming" o fondearlo en el lecho, siempre y cuando
los sellos resistan y el sistema de lastre pueda vencer la
presión de la profundidad para volverlo a superficie. Se puede
sumergir el submarino verticalmente sin necesidad de utilizar el
empuje del motor ni los planos de profundidad. Hay muchas
alternativas para construir un sistema de este tipo.
Desventajas: se debe contar con sistema de fail-safe, o bien
sistema de limitación de profundidad, ya que si se pierde la
señal con los tanques inundados y habiendo logrado flotabilidad
neutra o negativa, no tendríamos forma de regresar el modelo a
la superficie. En función de la complejidad del sistema elegido,
se necesita contar con conocimientos técnicos para la
construcción del mismo.
HIBRIDO (o sistema de inmersión híbrida): es el caso en el que
nos centraremos en este artículo, y de alguna manera podemos
adelantar diciendo que reune características de ambos sistemas
citados anteriormente, o sea, digamos que este sistema no es
puramente dinámico ni puramente estático.
Podemos no solo construir un modelo de submarino RC pensando en
incorporar este sistema, sino también, partiendo de alguno que
en su momento hayamos construido como de inmersión dinámica,
modificarlo incorporando este sistema, siempre y cuando contemos
con espacio dentro del compartimiento estanco.
En este caso, podemos decir que el modelo submarino de hecho
cuenta con un sistema de lastre, o sea, puede variar su
desplazamiento a fin de lograr la inmersión, pero que en ningún
momento se alcanza flotabilidad negativa, ni siquiera neutra.
Vamos a iniciar el análisis mencionando su única desventaja:
con este sistema no se logra una inmersión estática completa,
ya que si bien podemos sumergir el submarino sin necesidad del
empuje del motor ni planos de profundidad, este no se hundiria
completamente sino hasta determinada cota, que bien puede ser, de
periscopio.
Pero este sistema tiene varias ventajas: no se necesita construir
un sistema de lastre demasiado reforzado ya que no se necesita
comprimir aire, o bien utilizar complejos y costosos sistemas de
pistón, con el consabido elevado consumo de baterias. Por
ejemplo, podemos simplemente construir uno con un envase
plástico y una bomba reversible tipo lavaparabrisas. No tenemos
que forzar la maniobra como en el caso del sistema dinámico, ya
que el submarino, al cargar agua, se hunde hasta una cota a
partir de la cual con leve empuje y acción de los planos podemos
sumergirlo.
Por si falta mencionar alguna ventaja, también contamos con el
sistema de seguridad que implica mantener flotabilidad positiva
aun con el tanque lleno de agua, solo que si cortamos motor, el
modelo no subirá a superficie como una boya (tal como sucede en
el sistema dinámico) sino más bien lentamente, y depende de
cuan positiva sea su flotabilidad en inmersión.
El sistema de lastre híbrido suele ser "tipo snort",
refiriéndose al hecho de que se conoce como snort a un tubo que
permita tomar aire una vez cerca de la superficie, por ejemplo, a
cota de periscopio, siendo el periscopio o alguno de los otros
mástiles el snort que pueda tomar aire una vez asomado fuera de
la superficie del agua. De esta manera, para emerger, solo
debemos llevar el modelo cerca de la superficie hasta que asome
el snort, luego accionar la bomba en sentido de
"soplado" de tanque... y completaremos la maniobra de
emerger hasta la correcta línea de flotación.
En nuestro hobby, es bastante común hacer "ingenieria
reversa", por asi decirlo, ya que en vez de pasarnos años
diseñando y construyendo modelos antas de llegar al barco
"real" (1:1), como en un verdadero astillero, más bien
una vez logrado el modelo, nos dedicamos al método de prueba y
error, hasta encontrar, en el caso de submarinos RC, la cantidad
de lastre fijo y corcho (todo aquello que brinde reserva de
flotabilidad) a fin de lograr el correcto momento de driza
(verticalidad tanto en superficie como en inmersión), y la
capacidad del tanque de lastre necesaria para la inmersión.
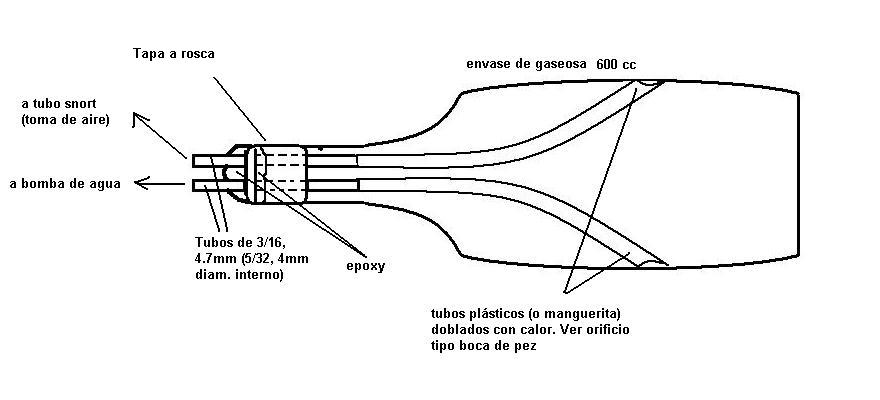
Vamos a detallar un ejemplo de sistema de lastre híbrido, con
envase plástico y bomba de engranajes reversible de
lavaparabrisas.
Como se ve en el esquema, la bomba se intercala entre el agua
exterior y la entrada al envase, y del mismo sale una manguera
que va al snort, el cual tomará aire una vez asomado sobre la
superficie. Según algunas pruebas realizadas, estas bombas,
alimentadas con 12V, suelen cargar 750 cc en unos 40 segundos;
supongamos que utilizamos un envase plástico de gaseosas de
600cc, fácil de conseguir. Las tapas de estos envases
gasificados están diseñadas para sopertar la presión interna y
sellar el envase, ideales para nuestra aplicación. Repito, esto
es solo un ejemplo y la capacidad del tanque dependen del tamaño
el modelo de submarino.
Los tubos, que en este caso son de bronce de los que se consiguen
en tiendas de modelismo, son de 3/16 de diámetro externo, a los
que acoplamos mangueras de acuario. Una de las mangueras que
parte de la tapa del envase va a la bomba, de la cual parte a su
vez otra manguera que se comunicará con el agua exterior a
travéz de alguna de las tapas del cilindro estanco o de alguna
manera eficaz y segura, según el modelo. La otra manguera
también sale al exterior pero luego debe conectarse al snort
para tomar aire.
Lo que debemos tener en cuenta es que las tomas de agua y aire
dentro del envase tengan la curvatura necesaria para, en el caso
de toma de agua, siempre tomar toda el agua psible dentro del
envase para expulsarla al emerger, como así tambien, en el caso
de la toma de aire, poder expulsarlo al sumergirnos. Y en los
extremos practicaremos un orificio tipo boca de pez, para
permitir el flujo de agua/aire. Pueden hacerse con algún tubo de
plástico doblado con calolr que podamos acoplar a los tubos de
metálicos, o bien para el caso de toma de agua (la que va hacia
abajo) puede ser la manguera con el plomo tipo pick up de
combustible de los tanques de combustible de aviones RC.
Debemos ser generosos con el epoxy a fin de brindar rigidez y
sellado a las conexiones. Tener en cuenta no afectar el sello del
lado interno de la tapa a rosca, pues lo que sella no es la rosca
sino el borde del pico del envase al hacer tope contra la cara
interna de la tapa.
Idealmente situaremos el tanque en el centro geométrico del
submarino, en el cual supuestamente ya hemos situado el centro de
masa.
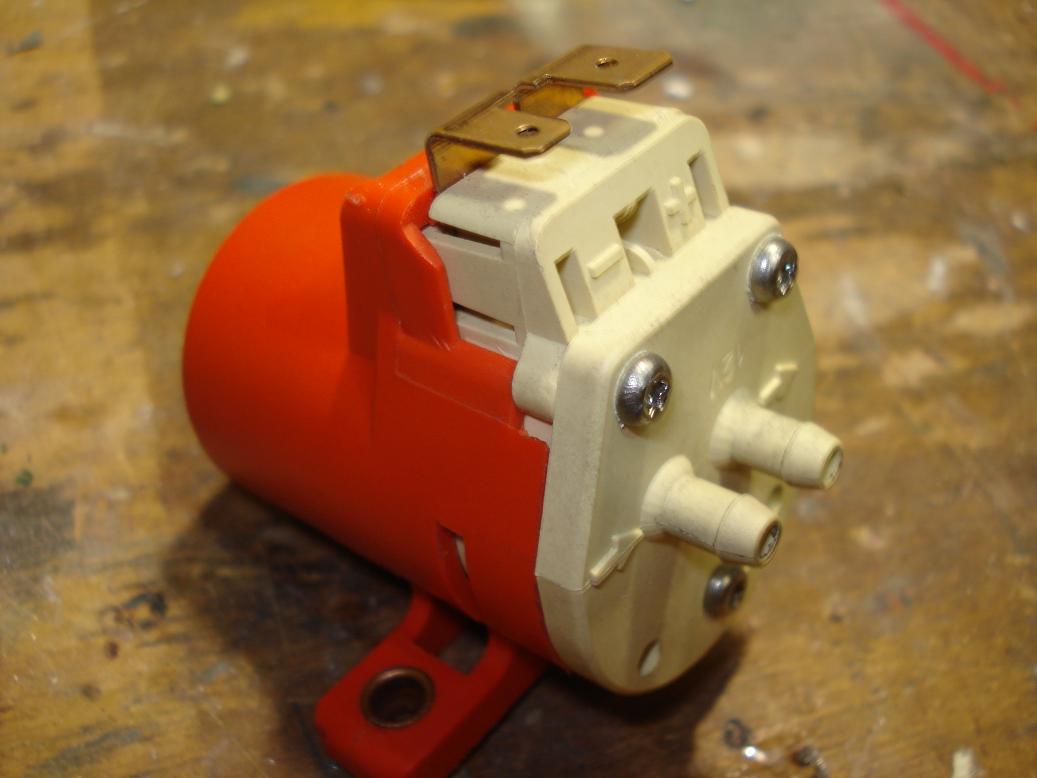
Este es el tipo de bomba de engranajes que utilizo con éxito:
Recordemos que si accionamos el sistema lejos de la superficie,
no notaremos cambio alguno en la profundidad del modelo, puesto
que, agua que expulsemos, será agua que tomemos por el snort,
que sí pasará a tomar aire una vez expuesto en la superficie.
Volviendo a nuestro caso de ingenieria reversa, supongamos ya
tenemos convenientemente lastrado (lastre fijo) a nuestro sub de
manera que flota correctamente en superficie, entonces llenamos
el lastre (veremos salir agua por el snort) y vemos qué sucede:
1) El modelo tiene flotabilidad negativa y se hunde, esta seria
la mejor noticia, significa que el lastre fijo es correcto, solo
nos falta más corcho en la obra muerta (la parte expuesta sobre
la superficie estando el modelo en flotación), lo cual no solo
balancearia el lastre hasta lograr la flotabilidad positiva
deseada, sino que aumentaria el momento de driza brindando aun
más estabilidad el modelo. Lo ideal seria colocarlo dentro de la
vela, pero probablemente debamos repartir trozos de corcho a lo
largo del casco en su parte superior. Recordemos que debemos dar
a esos trozos la forma adecuada para evitar que acumulen burbujas
limitando la inmersión.
2) El modelo se sumerje hasta determinada cota, conservando
flotabilidad positiva. Aqui debemos tomar la decisión de no
modifcar nada, agregar más lastre fijo (lo cual calaria más al
barco en superficie), o bien más corcho, si consideramos se ha
sumergido demasiado. Y todo esto depende de cuanto queremos que
se hunda con el tanque lleno, en función de la reserva de
flotabilidad deseada, y del empuje necesario del motor para
sumergirlo dinámicamente, una vez lleno el tanque. También en
este caso es probable que nos hayamos quedado cortos con la
capacidad del tanque de lastre, esto es evidente si es mucho el
lastre fijo que debemos agregar; en este caso, salvo que el
lastre fijo adicionado no suba demasiado la línea de flotación
en superficie, debemos conseguir un envase de mayor capacidad.
Lo ideal en ambos casos, seria lograr una flotabilidad levemente
positiva, lo suficiente como para que el snort asome pudiendo
tomar aire, aun con el lastre lleno, para poder vaciarlo y
emerger totalmente. Recordemos poder contar con la posibilidad de
agregar pequeñas cantidades de lastre fijo convenientemente
colocados en el casco, o bien adherir trozos de corcho (como por
ejemplo poliestireno expandido), todo ello buscando el correcto
adrizamiento (verticalidad) como horizontalidad del modelo, tanto
en superficie como sumergido. Es un proceso que lleva algo de
tiempo.
Aqui he mostrado el esquema del sistema sin incluir la parte eléctrica, como ser los switches que hacen funcionar la bomba en cada sentido, pero eso está detallado en otros artíiculos, como el del mi SSN22 en esta misma web.
Roberto Villaverde