
Submarino alemán tipo VIIC/41 de la segunda guerra, conversión a RC
Por Roberto Villaverde
Introducción
Como ya me ha sucedido en otras oportunidades, sin tener la intención de construir determinado modelo o de realizar la conversión a RC de un determinado kit, por una de esas casualidades me topé con la oportunidad de adquirir un kit en escala 1/72 del temido tipo VIIC/41. No solamente temido en su momento por los aliados debido a los estragos que los alemanes causaron en el transporte de víveres y pertrechos hacia Inglaterra, con el objetivo estratégico de "estrangularla", sino que el modelo mismo es bastante temido por modelistas, pues a la vez que fascina su siniestro aspecto, es bien sabido que su escasa manga complica demasiado adaptarlo a RC.
El tipo VII tuvo muchas variantes, A, B y C las más conocidas, esta última el caballo de batalla de la Kriegsmarine, la entonces marina de guerra alemana. Con 568 unidades comisionadas, fue el más numeroso y a la ve exitoso tipo de submarino. El tipo VIIC/41 era una mejora sustancial en cuanto a profundidad máxima respecto de su predecesor, alcanzándose la entonces increible profundidad de 250m.
Recordemos que por entonces el arma submarina era en realidad un barco que poseia la capacidad de sumergirse por tiempo limitado, mientras agotaba su baterias para propulsión eléctrica. Sus motores diesels movian generadores que cargaban las baterias para ser utilizadas bajo el agua. A partir de 1943 los alemanes comenzaron a instalar el "Schnorchel" o snorkel, que permitia al barco navegar sumergido pero asomando dicho dispositivo con el cual podia utilizar los diesels bajo el agua, intercambiando gases de escape y tomando aire a la vez.
Volviendo al modelo, en este caso las limitaciones de espacio me ayudaron a decidirme por un sistema de inmersión híbrido, que como ya expliqué anteriormente, no es ni estático ni dinámico, es decir, no se logra flotabilidad negativa y si bien se utiliza la propulsión y los planos de profundidad para sumergirse, no es dinámico pues este último método no utiliza tanque de lastre alguno siendo bastante irreal la inmersión al necesitarse gran velocidad y tener el modelo en superficie ya bastante calado.
En el sistema híbrido, con el tanque lleno de agua, el submarino debe conservar flotabilidad positiva (más vale que así sea!), digamos, lo llevamos a cota de periscopio, y para sumergirlo basta con accionar suavemente los planos y motores. Lo bueno es que en caso de pérdida de señal, el modelo regresa a superficie.
El casco
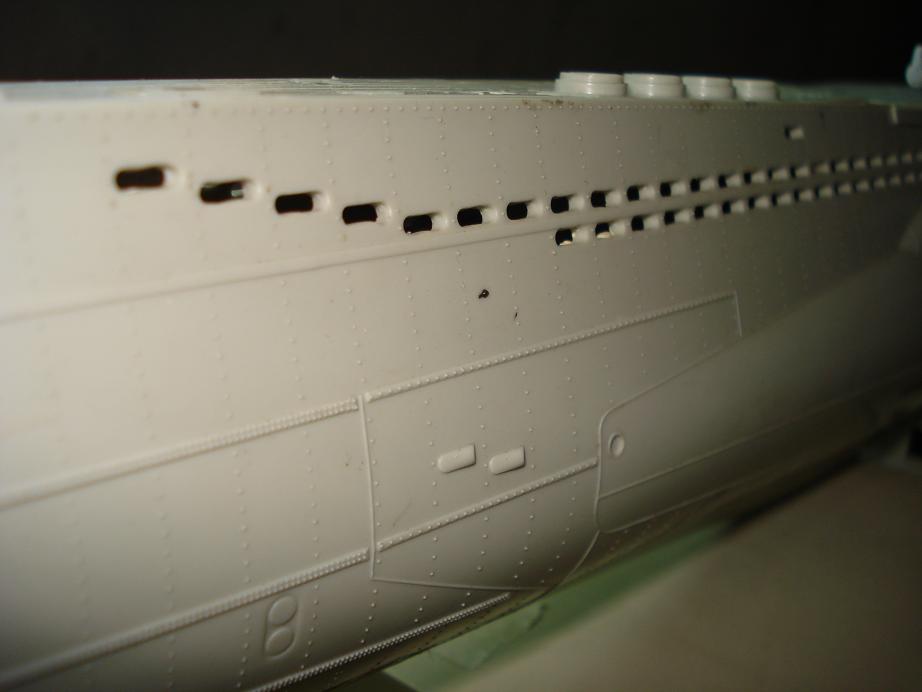
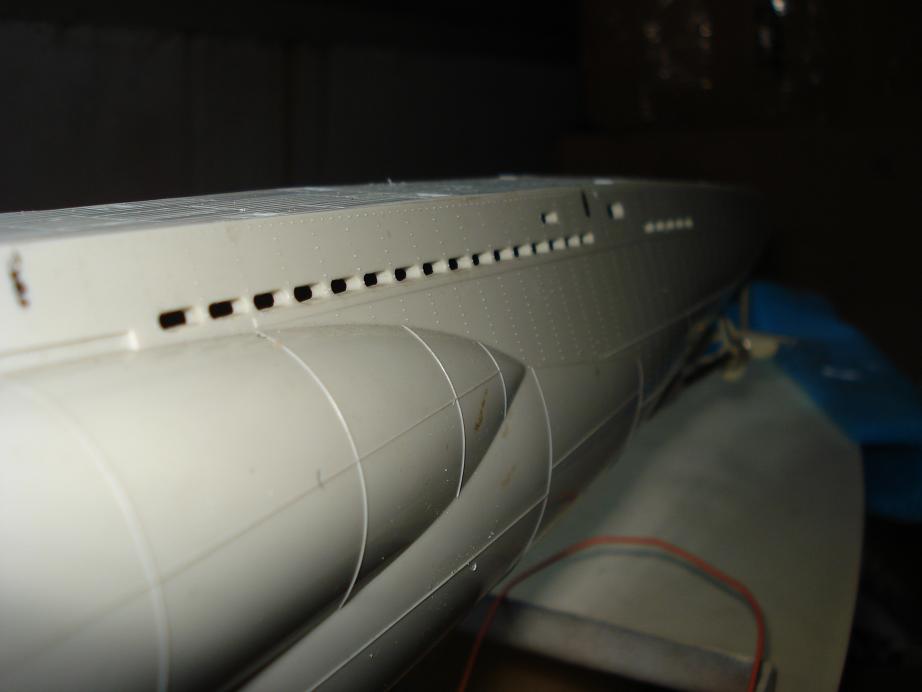
El casco viene en dos mitades que se unen en crujia, hasta la roda y el espejo. Los orificios de drenaje deben ser calados para permitir el acceso y fuga del agua, como así también del aire para los orificios superiores.
 |
 |
 |
 |
 |
 |
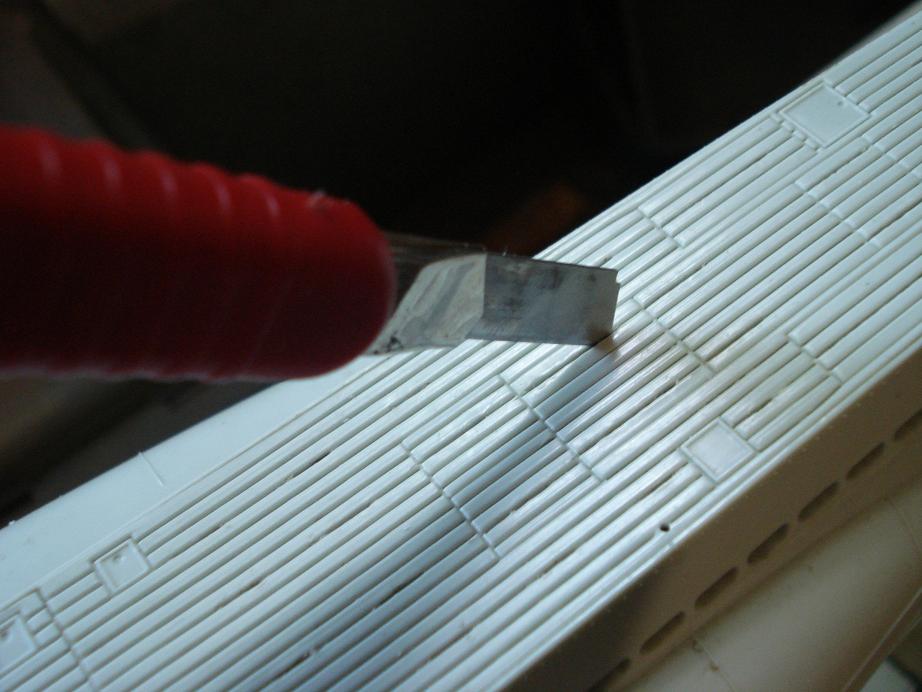
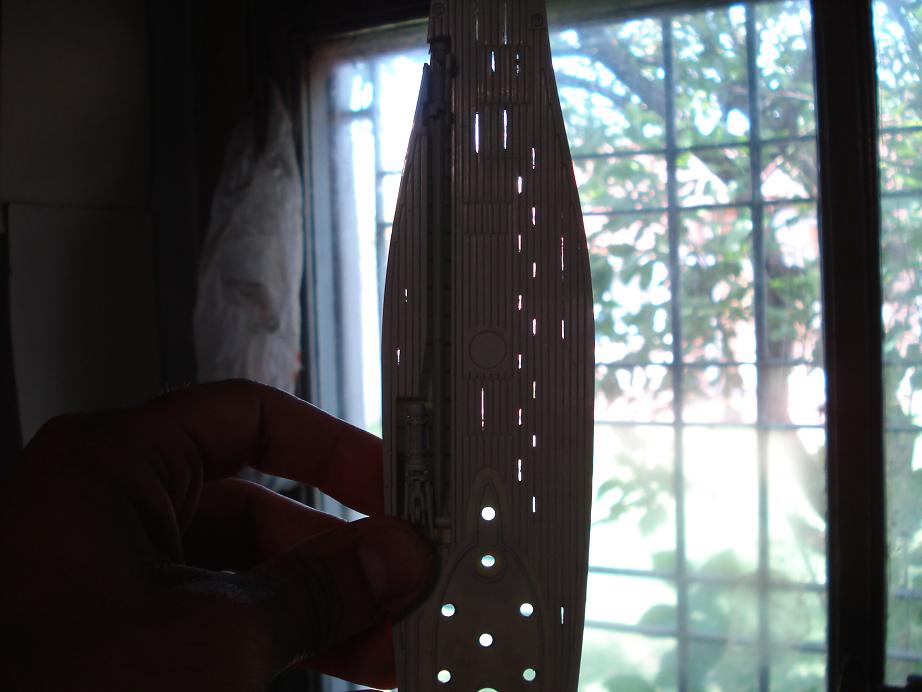
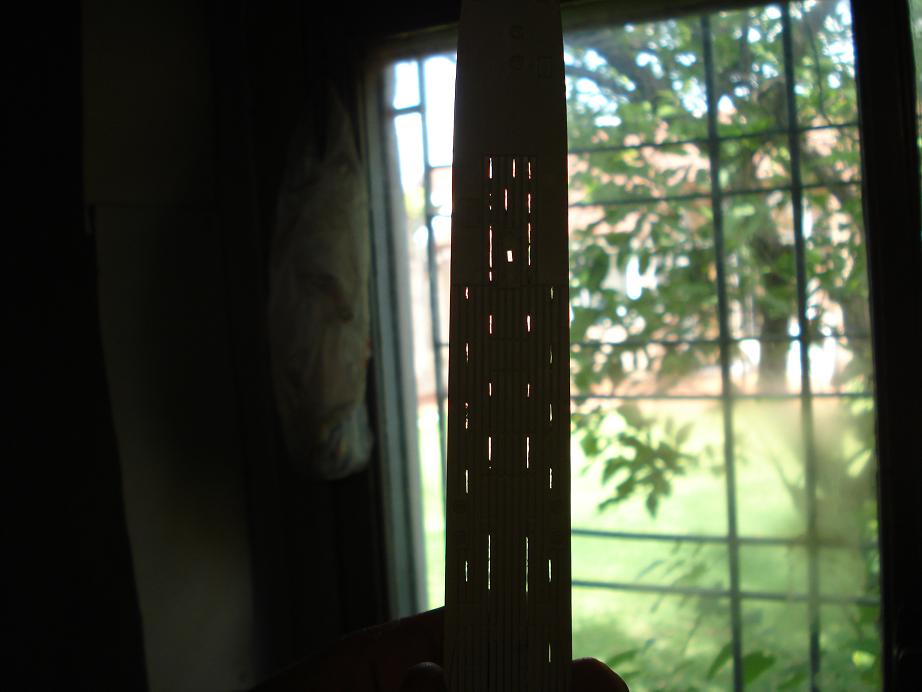
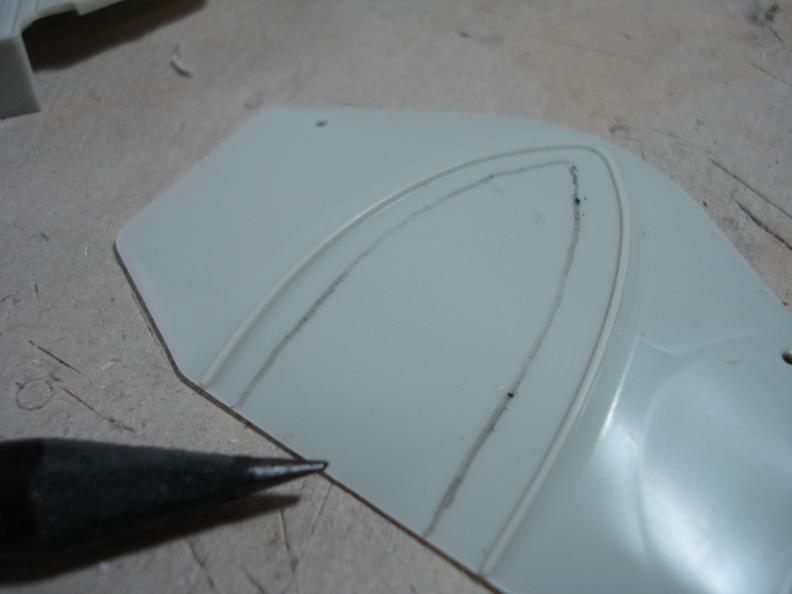
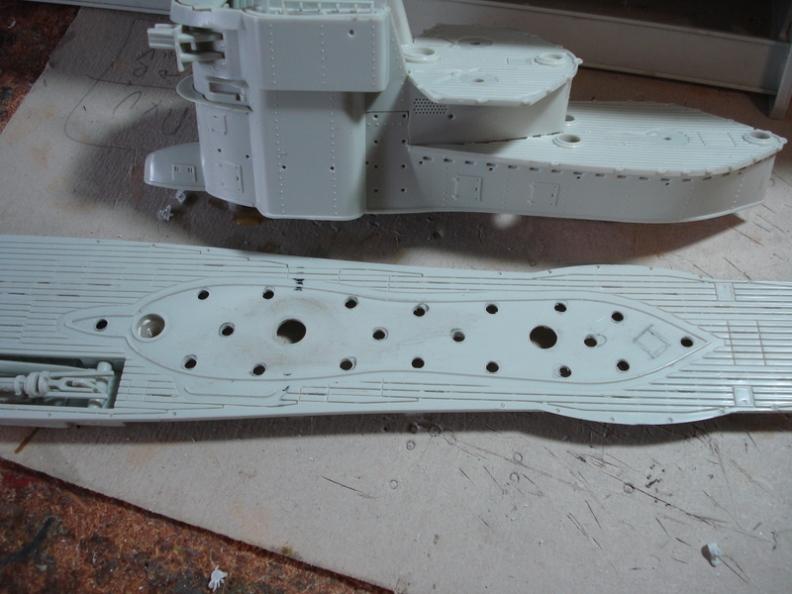
Las cubiertas eran de madera con caladuras para permitir
el drenaje de agua y la fuga de aire durante la inmersión.
Desafortunadamente las caladuras vienen en relieve pero no
hechas, por ello debí realizar unas cuantas, pero no todas las
que correspondian ya que el material, estireno, se debilita
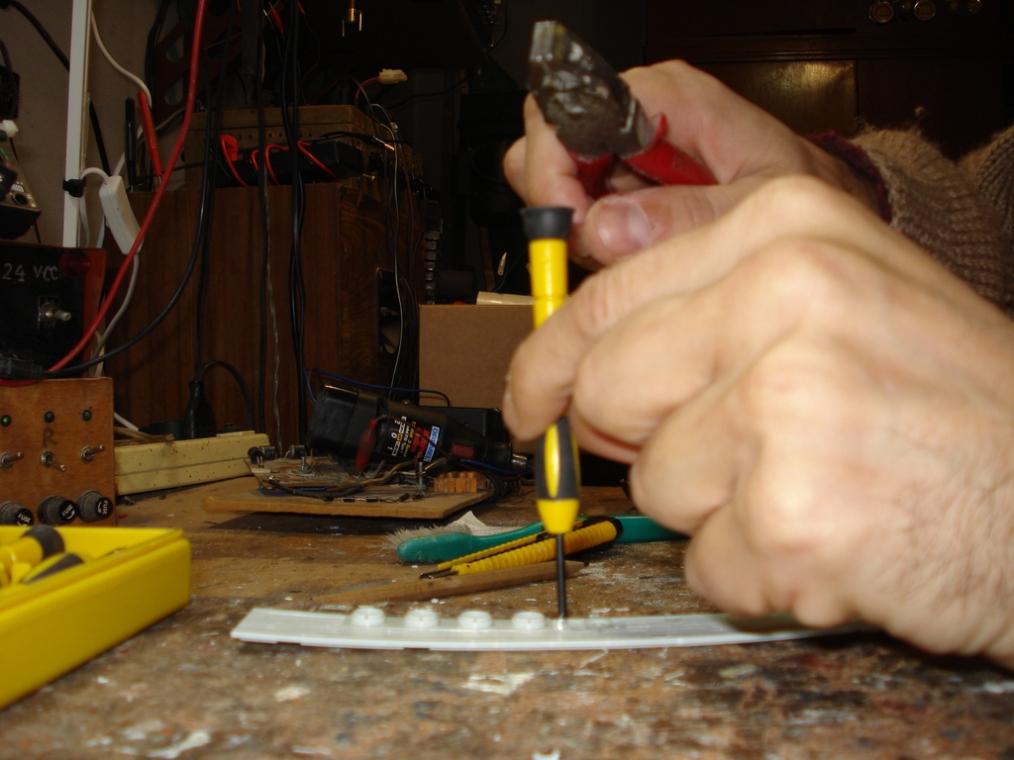
peligrosamente al punto de rotura de la pieza. Usando un
destornillador plano achatado aun más con el torno y una piedra
adecuada, y golpeando suavemente con un martillito, luego fui
calando con el cutter. Tembién realicé orificios estratégicos
en cubiertas de la vela y en todo lugar que consideré necesario.
He comprobado que el aire fuga de manera aceptable.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
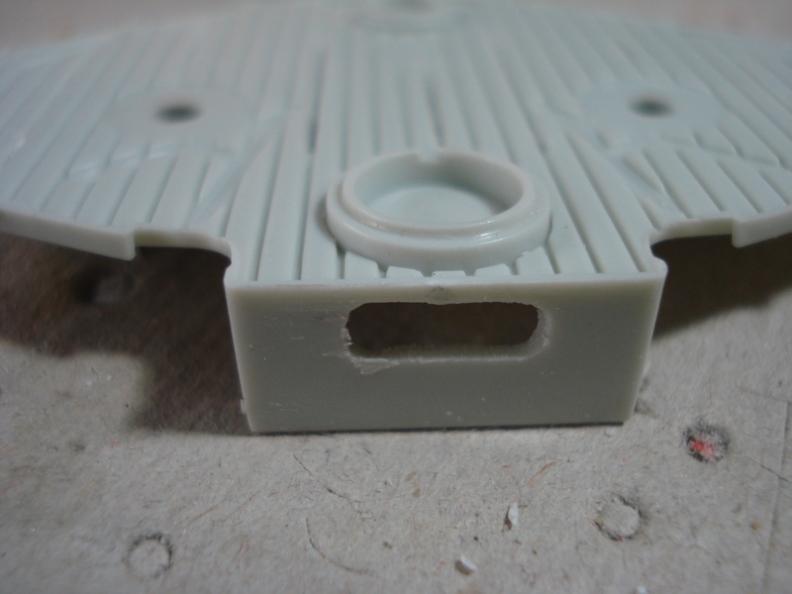
Lastre fijo
En el fondo del casco (que es donde el lastre fijo debe instalarse) hay 2 caladuras que vienen con el kit, desconozco si corresponden o no a la forma de la quilla, pero que permiten ubicar lastre en este punto convenientemente ubicado. Para ello tomé las medidas lo más aproximadas posibles y realicé 2 crisoles en madera donde vertí plomo derretido:
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Sitema de lastre
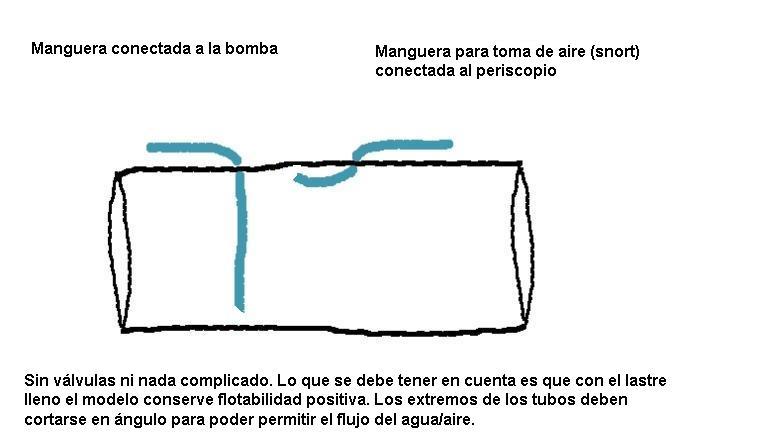
Como les adelanté, en este modelo instalaré un sistema de lastre híbrido. El tanque, de unos 220cc, lo construí a partir de un tubo de PVC de 50mm de diámetro, al que le pegué sendas tapas circulares con epoxy. Pero antes de cerrarlo, colocqué 2 tubos plásticos extraidos de bolígrafos de los más económicos, convenientemente doblados con el calor de un soldador (con una vaina de cable introducida previamente a fin de evitar que se estrangulen al doblarlos): uno para toma de aire, otro para toma/drenaje de agua. El esquema seria este:
 |
 |
 |
 |
 |
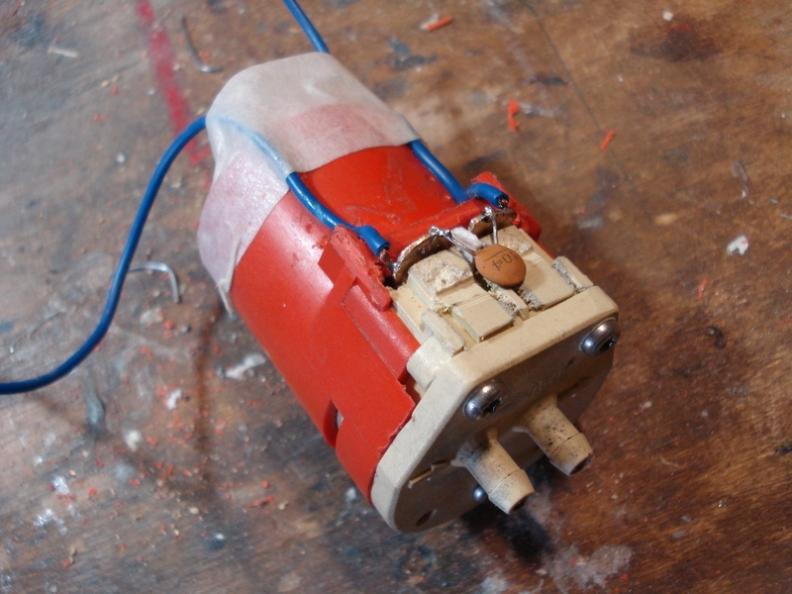
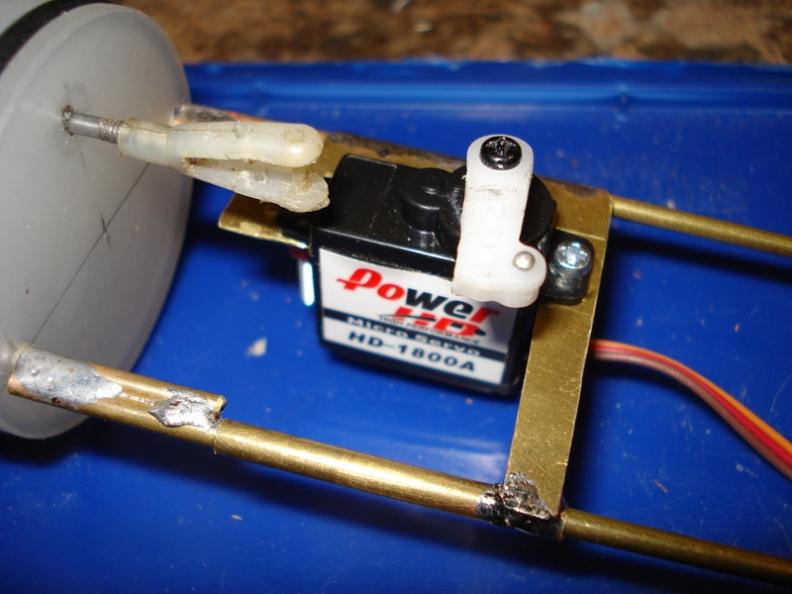
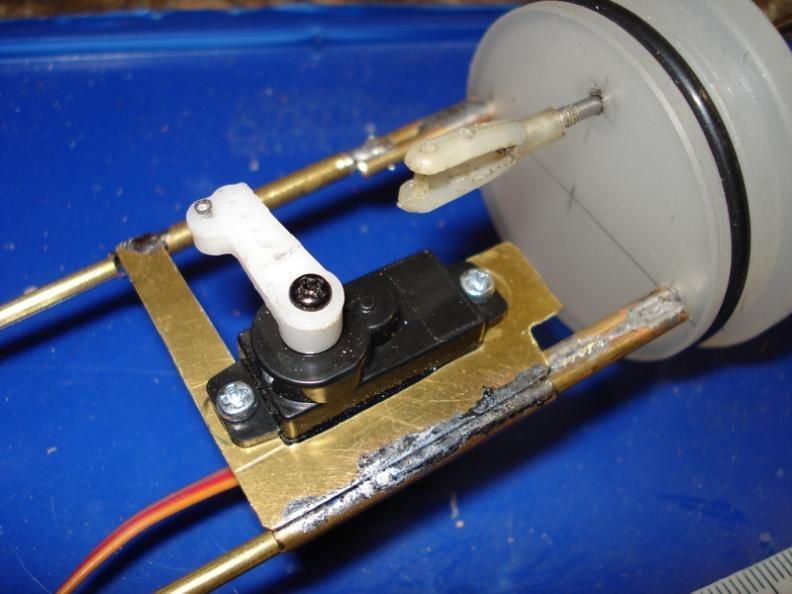
La bomba de agua utilizada es la misma que instalé en el Seawolf pero tuve que limarla para que pudiera entrar en la angosta proa del submarino, sellándola con crema epoxy luego de haber instalado el capacitor respectivo:
 |
 |
 |
 |
El sistema se completa con el snort (no confundir con el snorkel) o tubo que permite toma de aire, en este caso, disimulado dentro del mástil del periscopio: lo que hice es cortar el tramo superior del mismo, torneándo un extremo para que calce dentro de un tubo de aluminio de 1/8 (3.17mm), el cual a su vez tiene un pequeño orificio lateral para toma de aire; el otro extremo del mismo fue doblado convenientemente (para ello utilicé el clásico utillaje con tornillos y arandelas entre 2 chapas para que no se estrangule) a fin de acoplarse a la manguera de toma de aire del tanque:
 |
 |
 |
 |
 |
 |
 |
 |
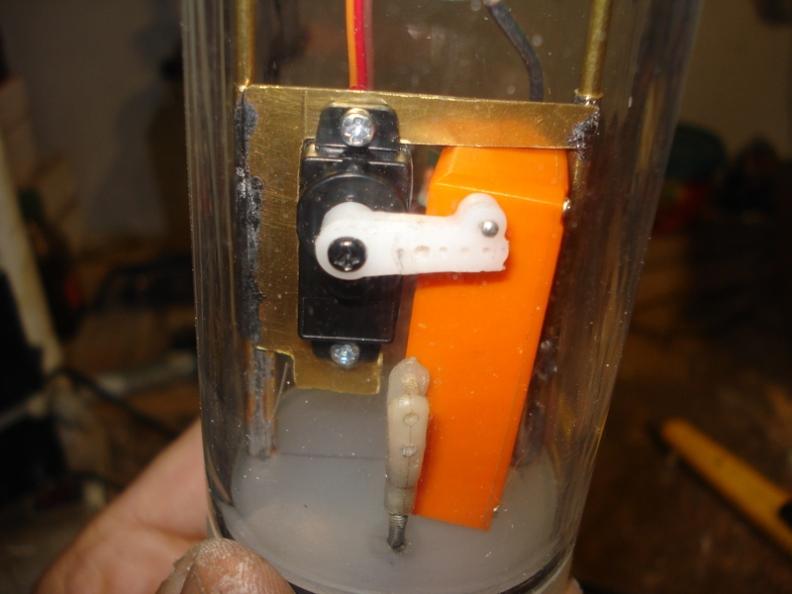
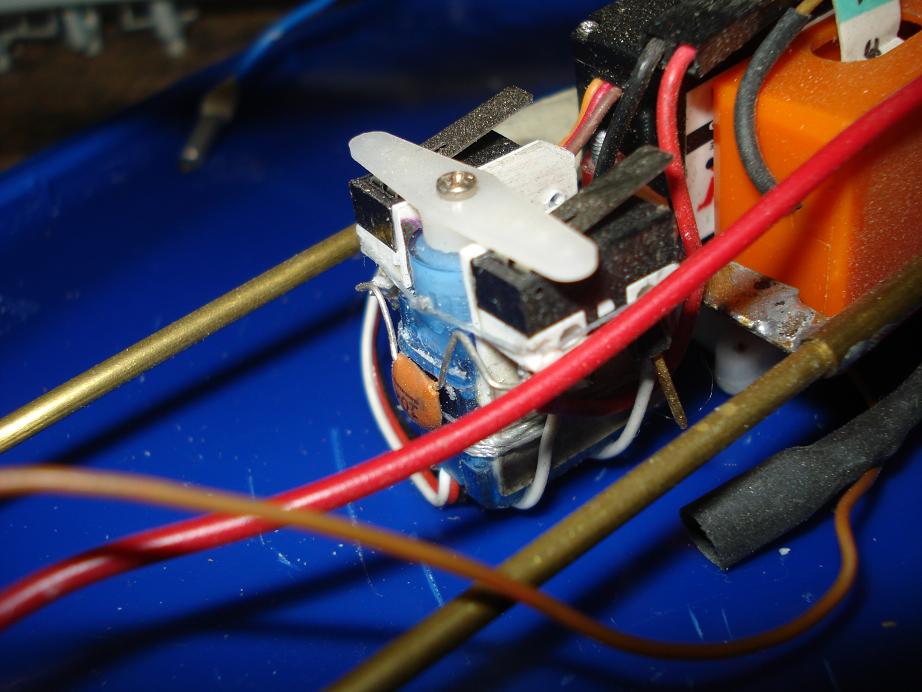
y el esquema de conexiones eléctricas de la bomba de lastre, con microswitches operados por servo:
Compartimientos estancos o WTC
Aqui me vi obligado, como les dije, por
razones de espacio dentro del casco, a utilizar no uno sino dos
tubos estancos, debido a la dificultad de poder insertar y
extraer un tubo tan largo en este casco que es generoso en su
acceso solamente en un pequeño tramo cerca del centro, luego
hacia proa y popa se hace muy angosto. Digamos que los
componentes instalados dentro del casco externo son, de proa a
popa: bomba de lastre, tubo de proa, tanque de lastre y tubo de
popa. Excepto para la bomba que descansa contra el casco, para
los otros 2 componente hice unos calces que no son otra cosa que
tiras de alunumio pegadas sobre tiras de goma, y tiras de goma
sobre estas para descanso de los tubos y el tanque.
Los tubos son de acrílico de 50mm de diámetro externo, con 2 mm
de grosor de pared. Las tapas son de plástico reforzado,
convenientemente torneadas para calzar en los tubos con el
alojamiento para junta tórica o-ring
El tubo de proa contiene:
Receptor
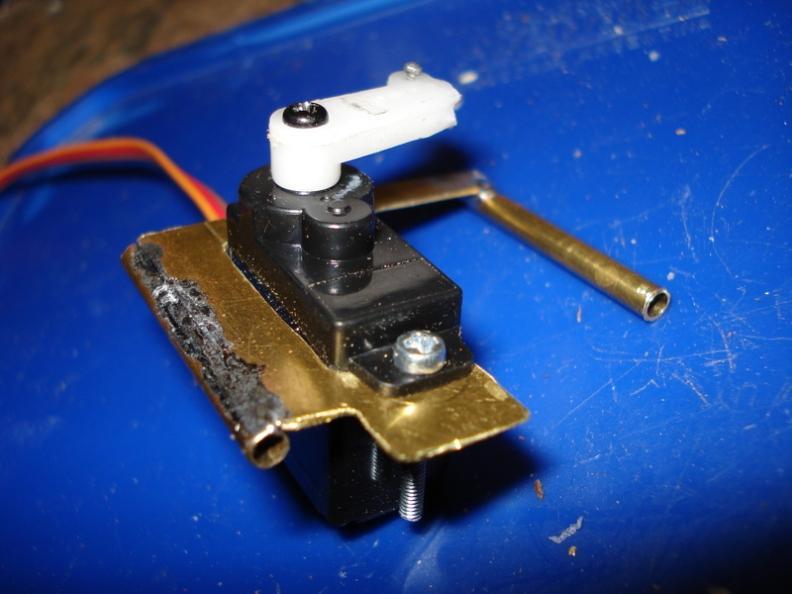
Servo de plano de proa
Servo de switch de bomba de lastre
Baterias
Mientras que el de popa:
Motores
Controlador de motores
Servo de timón
Servo de planos de popa
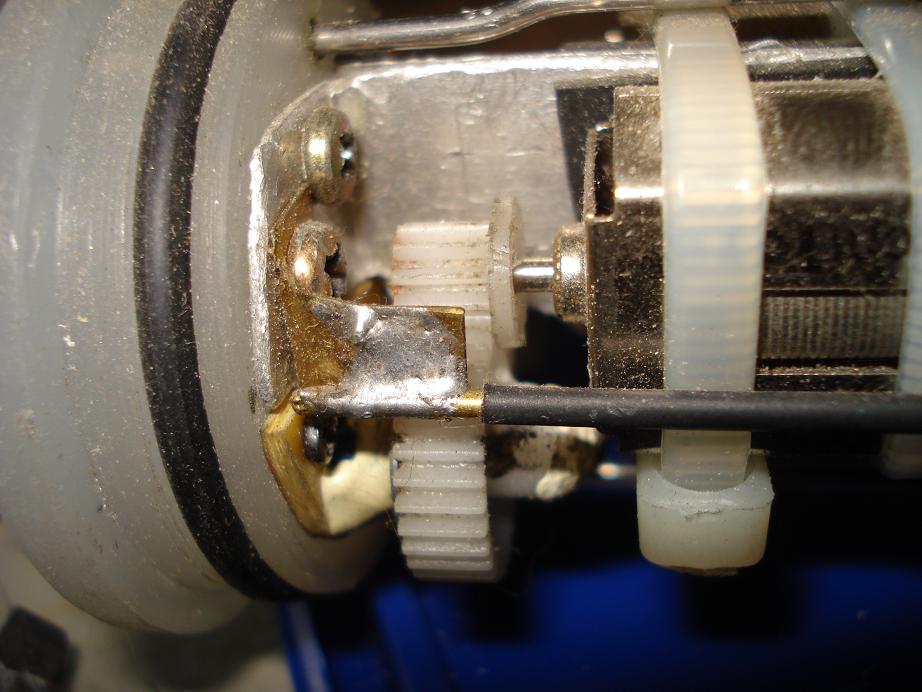
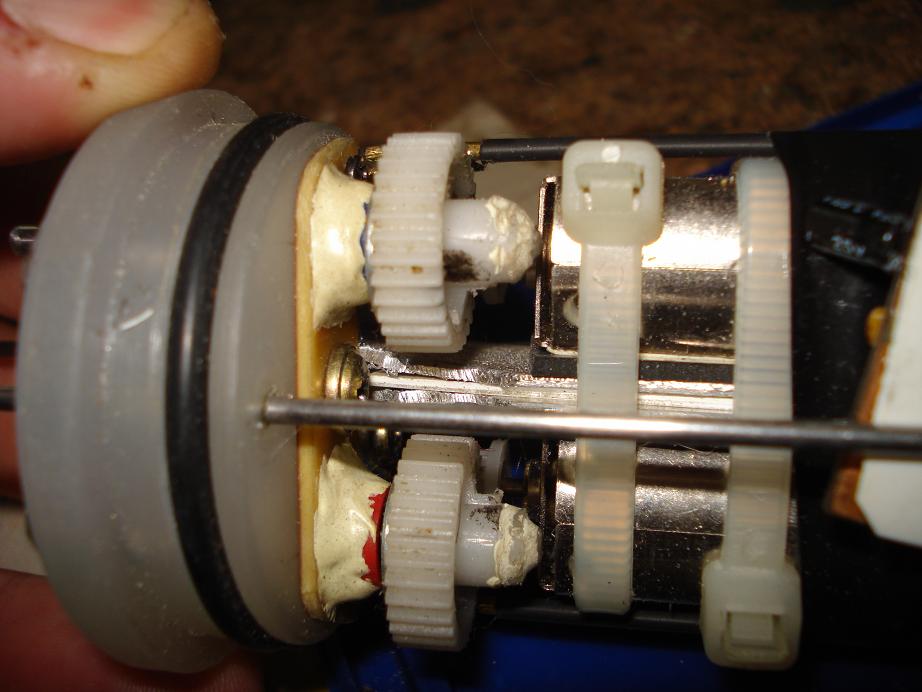
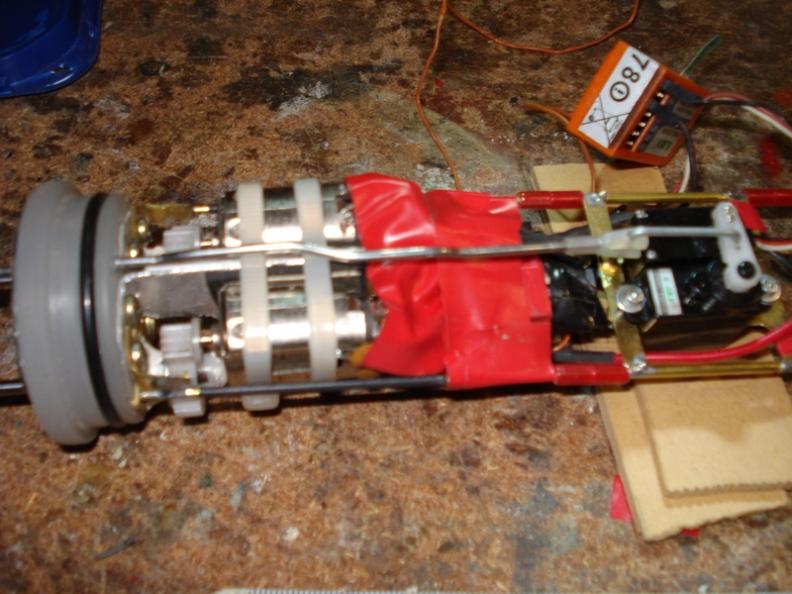
Aqui vemos los motores instalados, 2 RX-41 de autos slot, acoplados a engranaje con reducción 3:1, en el tubo de popa:
 |
 |
 |
 |
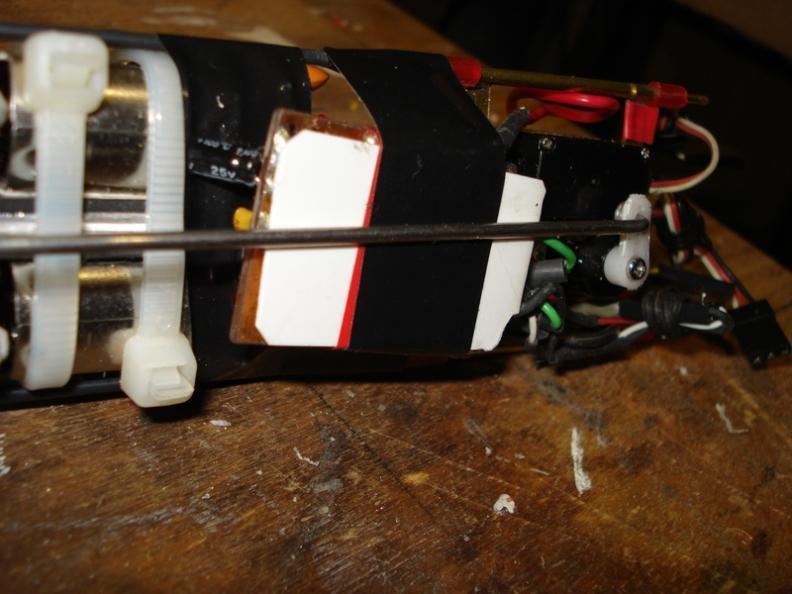
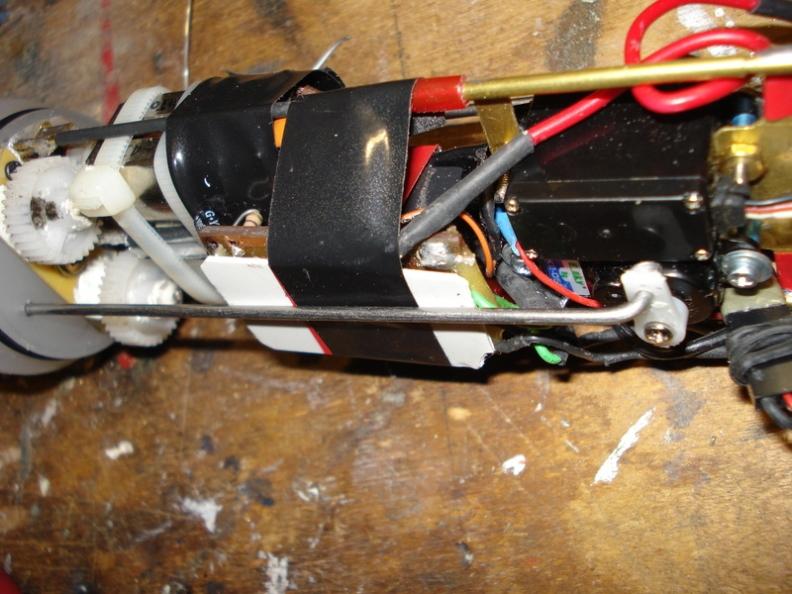
Y los servos de timón y plano de popa, en el mismo tubo; puede verse también el controlador de motores, envuelto en cinta aisladora:
 |
 |
 |
 |
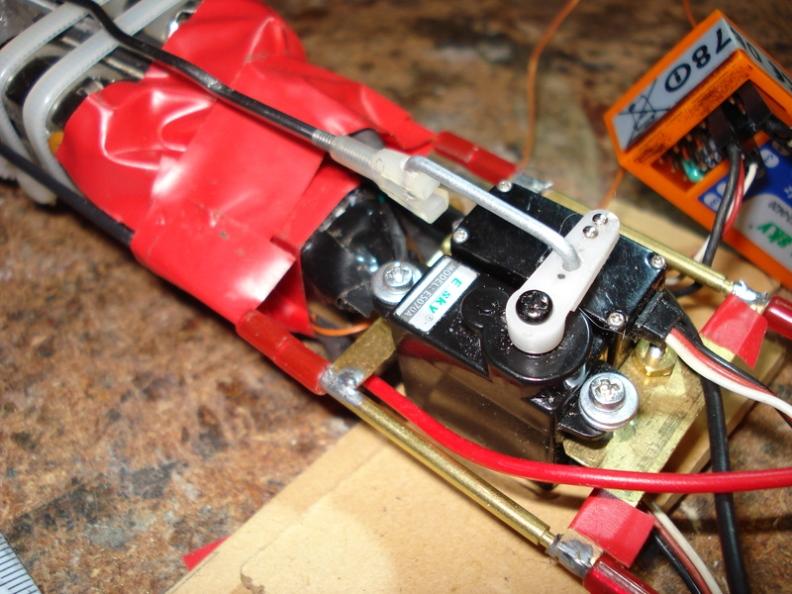
En el tubo de proa tenemos el receptor, el servo de plano de proa
y el de switch de bomba, también se aprecia la fijación de los
tubos y del tanque de lastre, con tiras tipo abrojo:
 |
 |
 |
|
 |
 |
 |
 |
 |
Entre ambos tubos queda el tanque de lastre, lo más centrado
posible en la media geométrica del casco. Las conexiones
elétricas entre ambos tubos, han sido casi un proyecto aparte
pues los sellos de las mismas varian ya que se trata de diversas
medidas, pues tenemos cables de energia de baterias y de señales
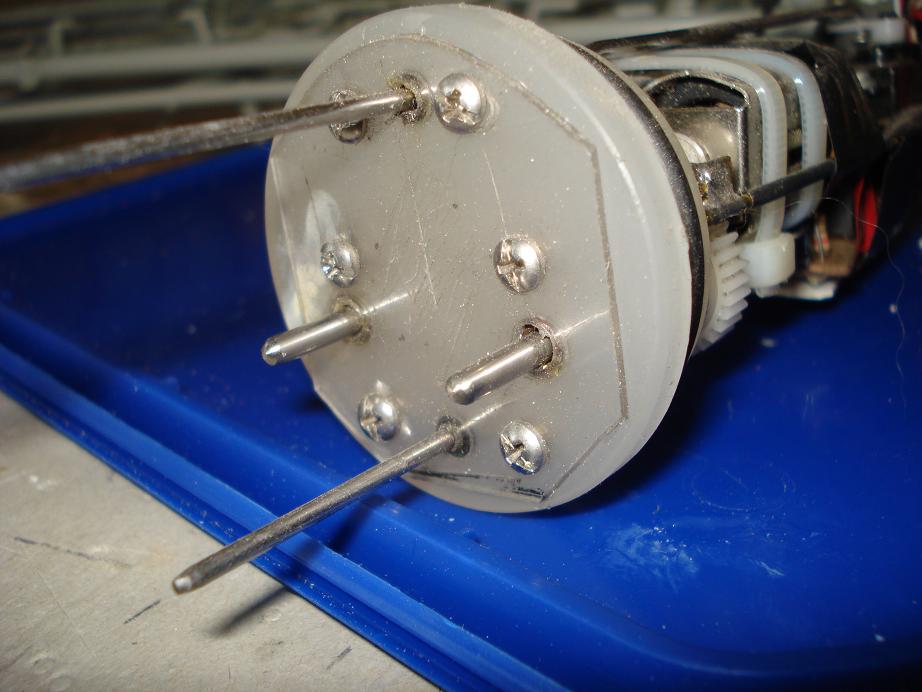
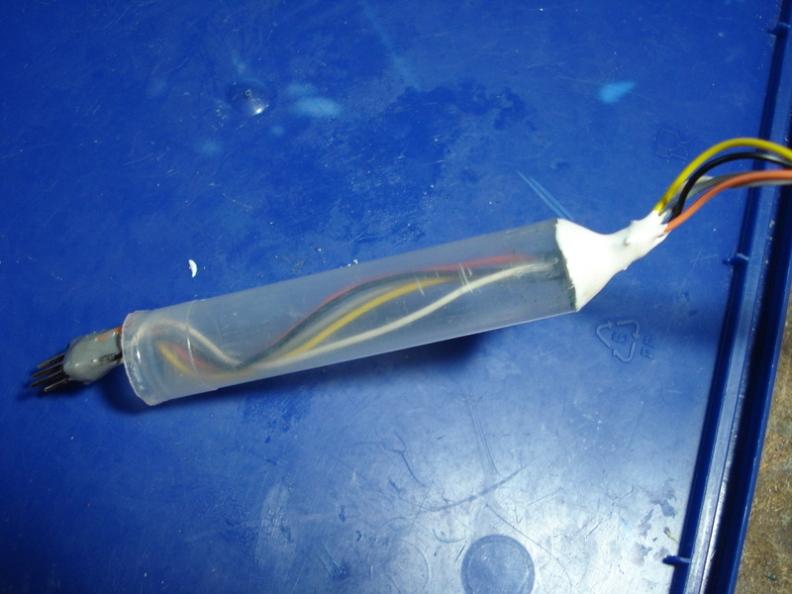
de canales RC. Para los primeros lo que hice es fabricar los
terminales macho-hembra a partir de terminales disponibles para
baterias, pero aislados dentro de tubos de aluminio que a su vez
quedan contenidos en manguaras de silicona:
 |
 |
 |
 |
 |
para los cables que llevan señal hacia controlador y servos del
tubo de popa, lo que hice es armar el conector de manera que
quepa dentro de una jeringa de 10mm de diámetro. Para
simplificar un poco este embrollo, no llevé todos los cables de
cada canal sino simplemente los de señal, puesto que los de
alimentación vienen aparte de la bateria (de hecho llegan al
controlador que tiene un regulador de 5V, luego este alimenta a
ambos servos):
 |
 |
 |
 |
 |
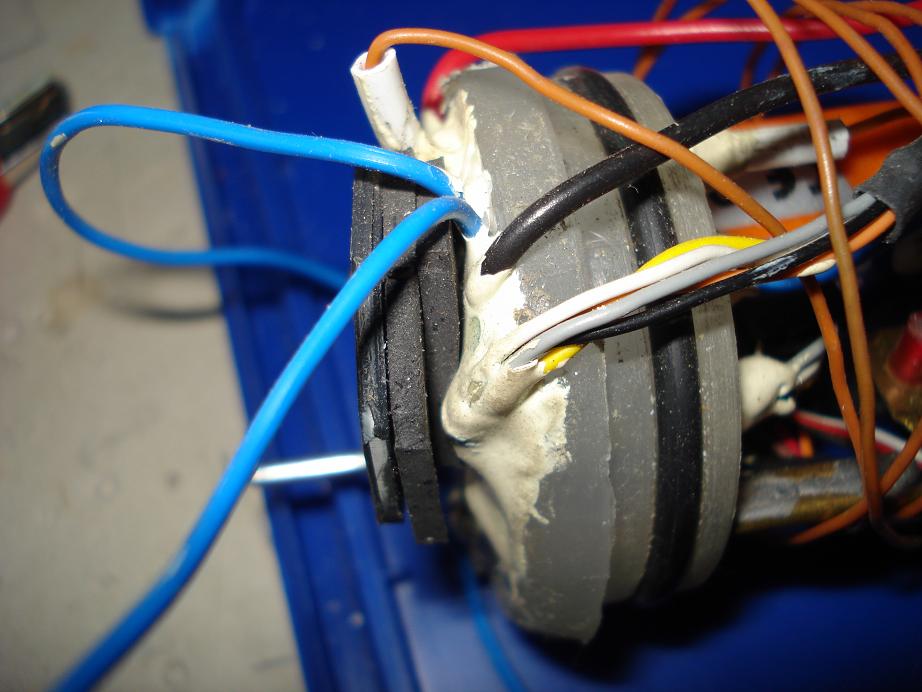
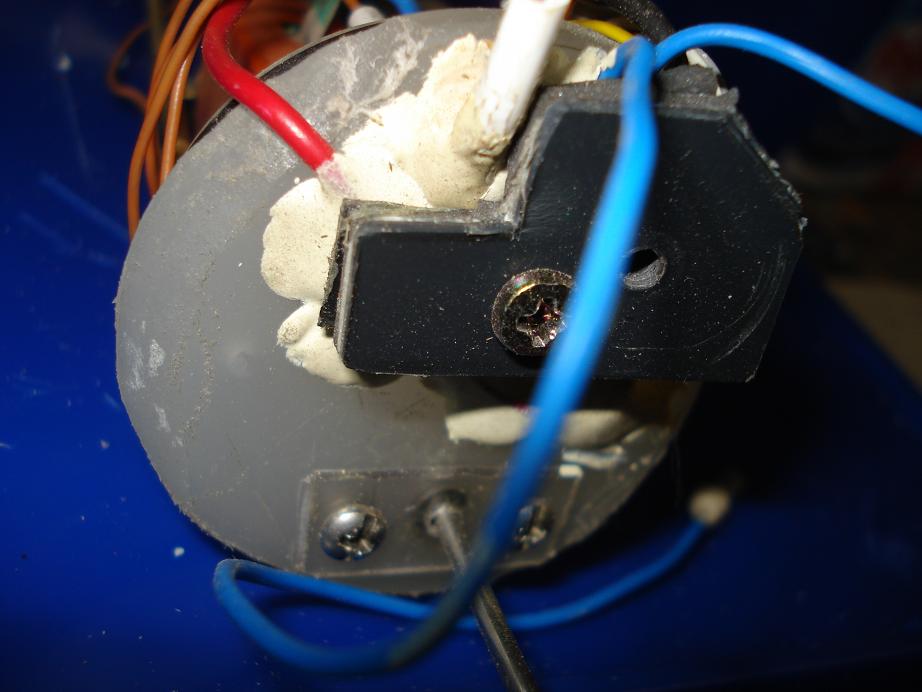
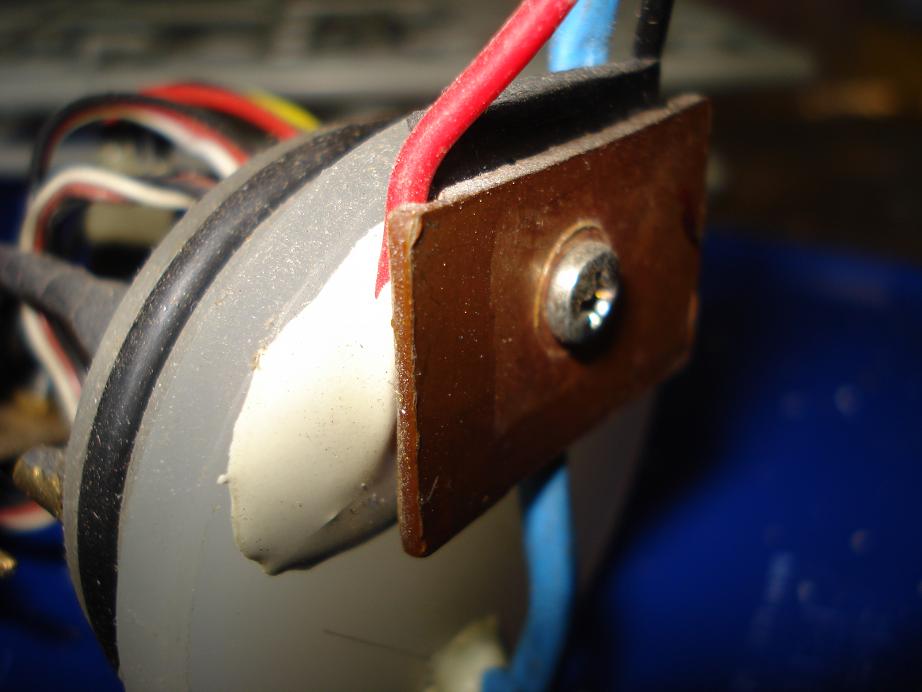
A su vez la salida de cables desde las tapas también debió ser sellado, en este caso, el orificio por deonde pasa cada manojo de cables fue rellenado con epoxy diluido con alcohol isopropílico para licuarlo y lograr un mejor rellenado. También improvisé prensacables para evitar se muevan respecto de las tapas aflojando la adherencia:
 |
 |
 |
Si se preguntan si todo esto funcionará, no se preocupen, yo me hago la misma pregunta una y otra vez.
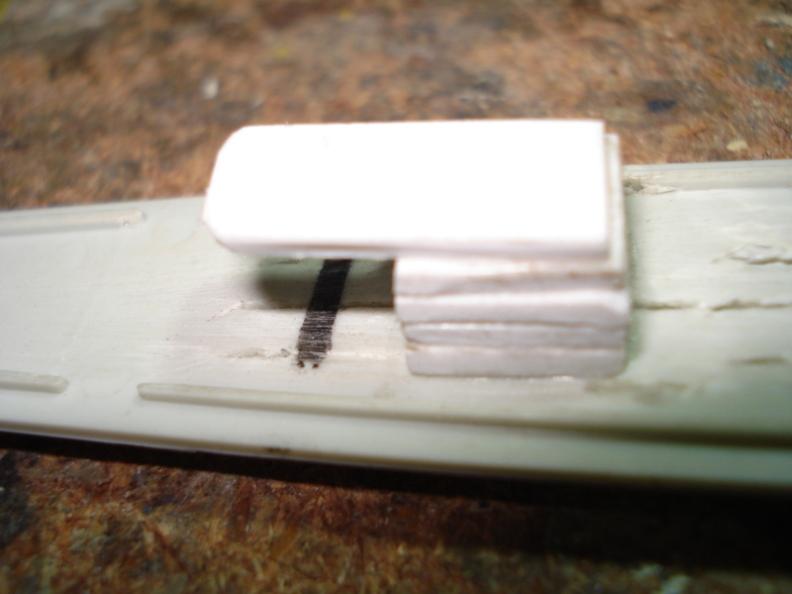
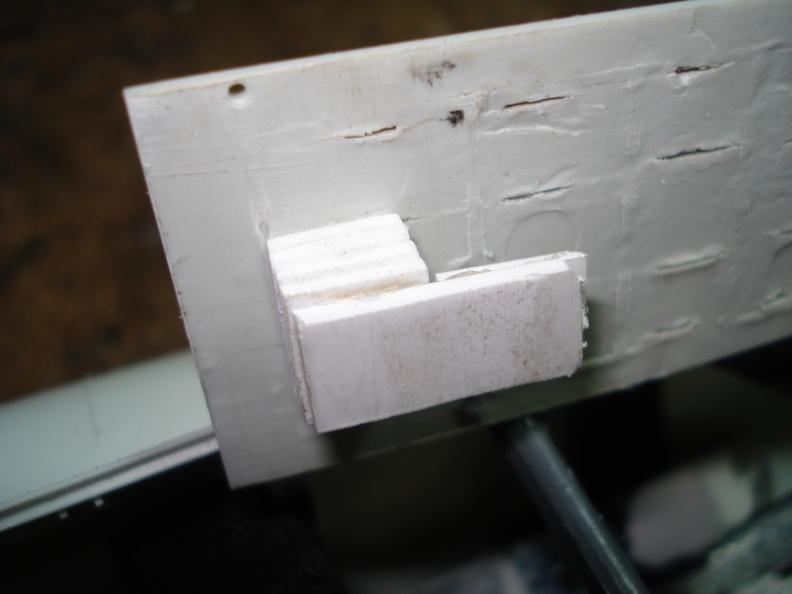
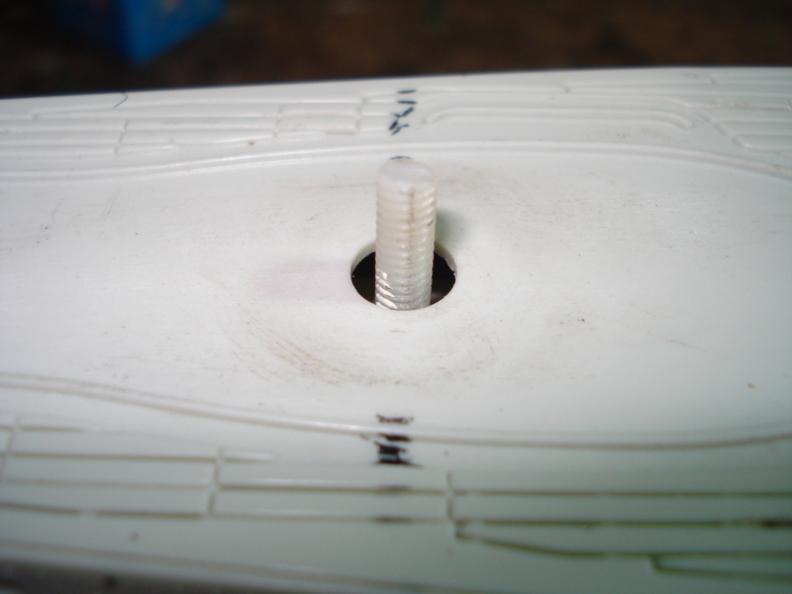
Anclaje de cubiertas
Las cubiertas vienen en 3 partes, de proa, central y de popa. Para las de proa y popa adherí unas tiras de estireno a ambas mitades del casco, en las cuales calzan unos encastres plásticos que adherí a cada cubierta en su cara inferior. Para la de proa adherí una varilla de alambre que calza dentro de la aguda proa. La cubierta central calza en las otras 2 gracias a una pestaña que viene en la misma a cada extremo, y para el ancjale decidó aprovechar la ubicación del tanque de lastre debajo de la misma: pegué un tornillo plástico en el tanque, este traviesa la cubierta y queda fijada con una tuerca de bronce:
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
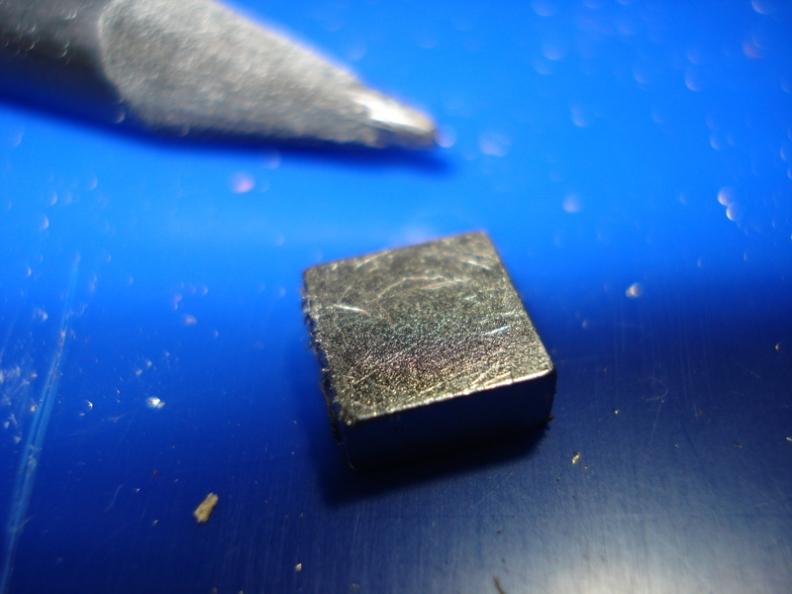
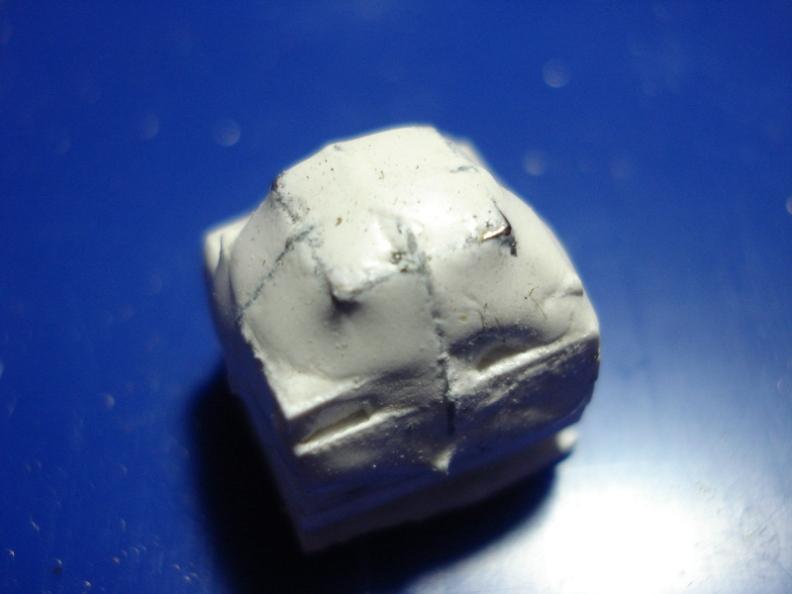
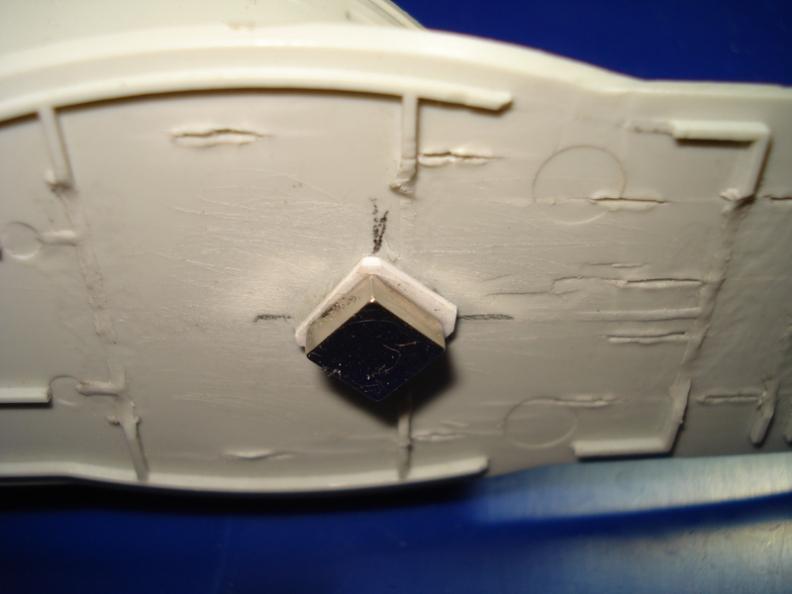
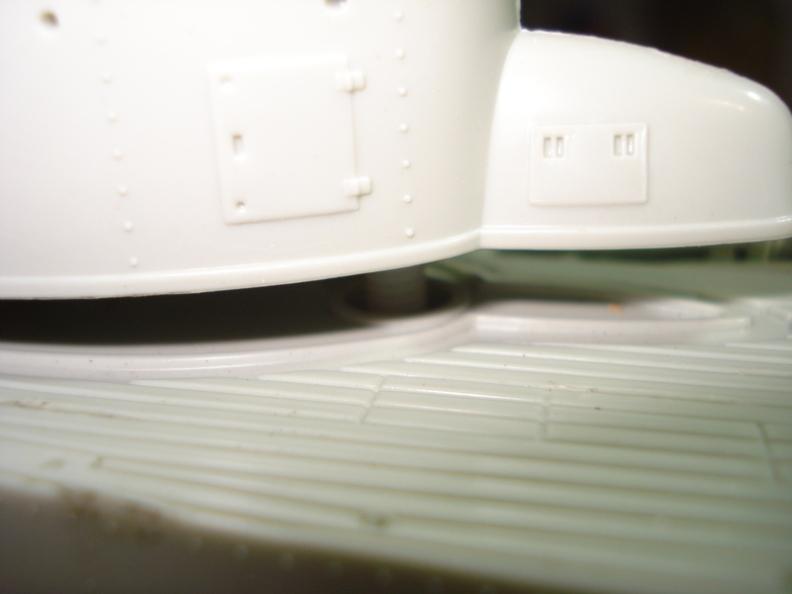
Anclaje de vela
Aqui a cosa se complicó un poco: decidí que utilizaria un tornillo en un extremo y un imán en el otro. El tornillo es en realidad uno de los periscopios (idea de Ricardo Caverzaschi), el de navegación, al que le corté la base, que es un tubo de unos 7mm de diámetro, dentro del mismo pegué un tornillo plástico que enrosca una tuerca plástica adherida a la cara inferior de la cubierta central, debiendo colocar una arandela y un tubito atravesado en el periscopio sobre la cubierta de la vela, a fin de hacer tope y que el dispositivo funcione; y en el otro extremo de la vela, hacia popa, utilicé 2 imanes cuadrados de unos 6mm de lado por 2 de grosor, de los potentes (imanes de "tierras raras" o neodimio), uno de ellos pegado a una base plastica dentro de la vela, el otro a la cara inferior de la cubierta central:
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Mandos, varillaje, planos de control
Los planos de control como el timón
provistos por el kit pueden utulizarse, pero debemos modificarlos
a fin de acoplarles los ejes respectivos.
Para el caso de los timones, lso perforé con mucho cuidado y
bajas vueltas del torno, no olvidemos sn de plástico, a fin de
insertarles un eje, tubo de 3/32 al cual en un extremo le acoplo
un engranaje, que a su vez es accionado por otro conectado a la
varilla respectiva. Haber tenido que recurrir a esto nos da una
idea de lo limitado que estamos dentro del casco de este modelo:
 |
 |
 |
 |
 |
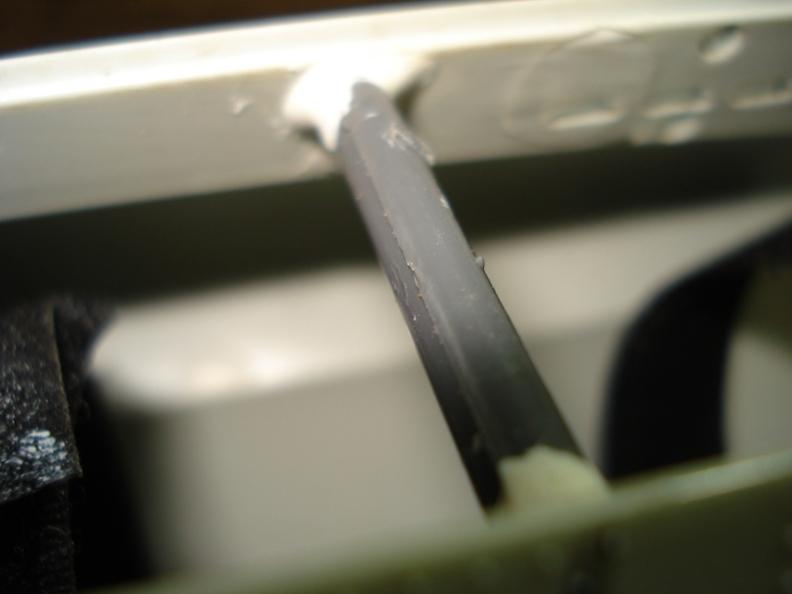
Para los planos de popa, la cosa es bien
complicada: el mando debe venir por la quilla, que apenas deja
unos 2 mm de espacio para la varilla inoxidable de 1mm en esa
sección hacia popa, el gráfico lo aclara un poco:
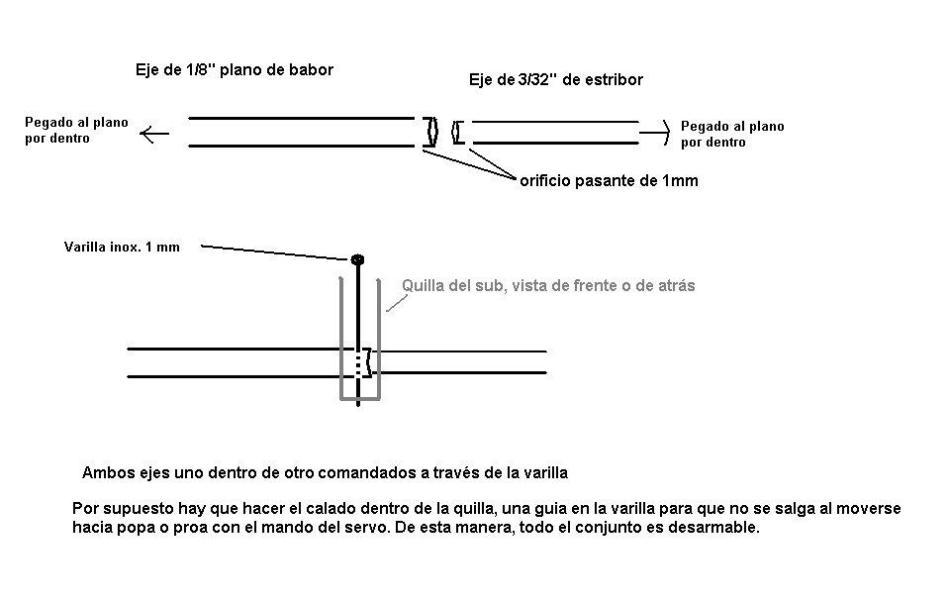
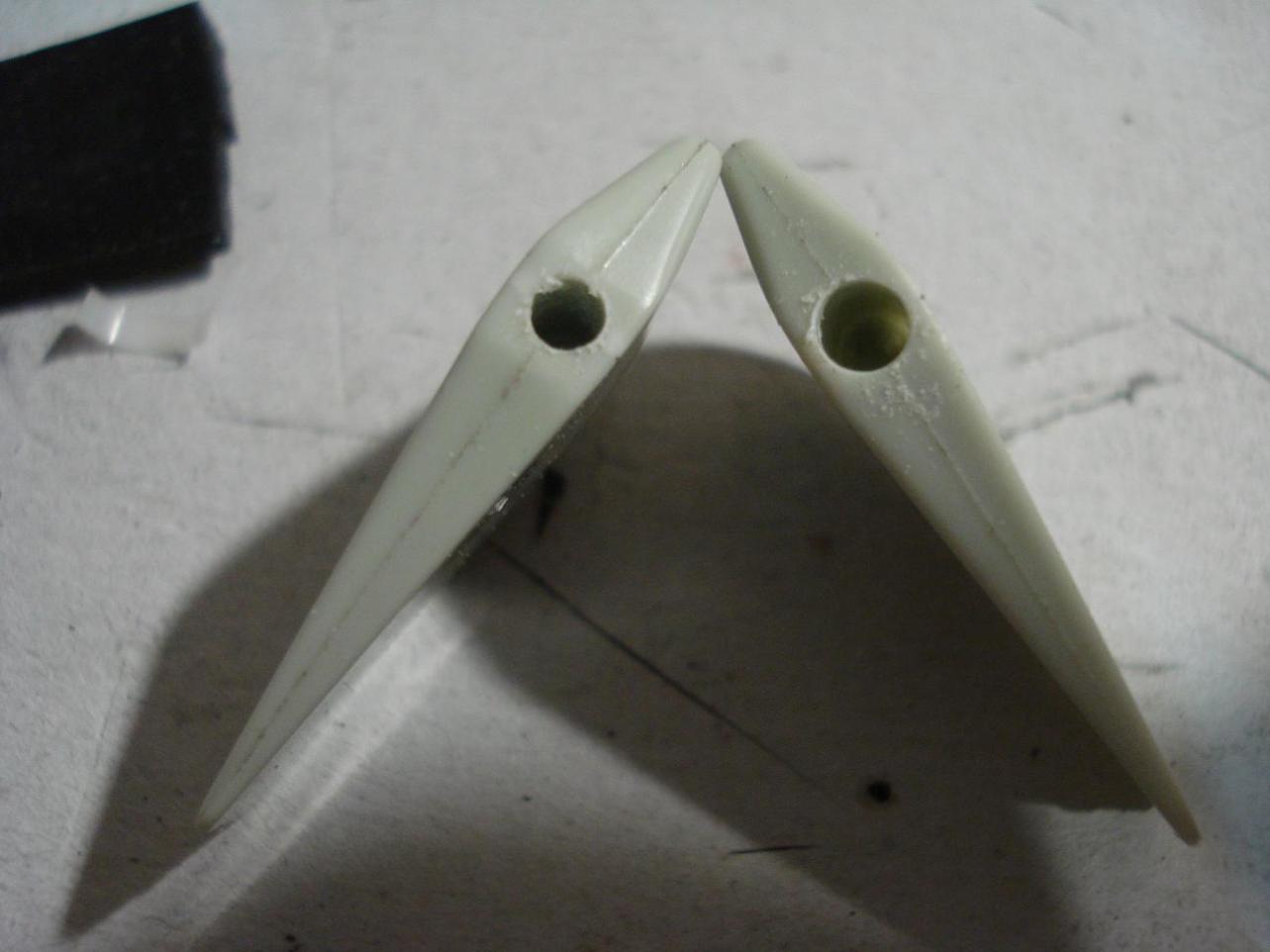
También aqui se deben perforar (con cuidado!) para los
respectivos ejes...que deben ser telescópicos para calzar uno
dentro del otro, como se puede ver:
 |
 |
 |
 |
 |
 |
 |
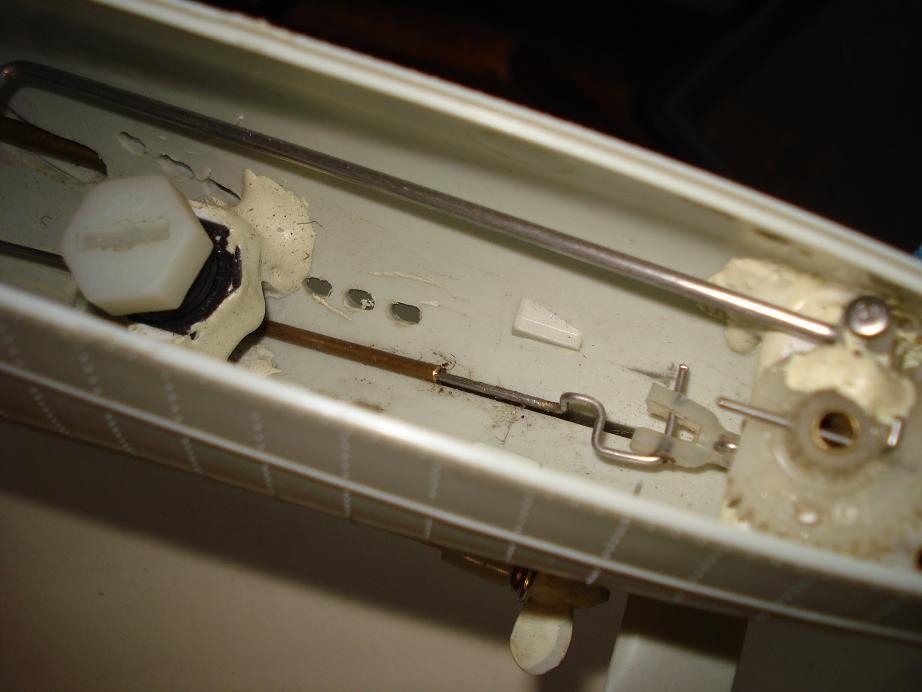
El problema es que el brazo de palanca se hace tan extenso que queda muy limitado el recorrido de los planos; cuando realice los tests en el agua veré si esto es un problema a resolver. En las últimas 2 fotos llega a verse como mantengo la varilla contra el casco pasándola por un tubo de 1/16 de diámetro interno (3/32 externo), el cual a su vez está presionado bajo un tornillo plástico, esto último para que el movimiento que viene del servo sea lo más lineal posible.
Para los mandos de proa la cosa no es tan compleja, de todos modos la solución no es del todo sencilla ya que el mando debe pasar por debajo de la bomba de lastre. Estos planos también tienen ejes telescópicos como los de popa. Improvisé unos bujes de plástico cortados siguiendo la quilla en ese tramo. Se me ocurrió dejar un tornillo en el acople de manera de poder variar el recorrido en caso necesario:
 |
 |
 |
 |
 |
 |
Alimentación eléctrica
El pack de baterias es de NiMH de 8.4V,
7 elementos, 2500mAh. Lo bueno de usar elementos independientes
es que el pack se puede armar de manera que ocupe menos lugar, en
este caso, acompañando la circunferencia interna del tubo donde se alojan:
 |
 |
parten 4 cables del pack de baterias, 2 más gruesos para alimentación general y 2 más finos para el switch de bomba de lastre.
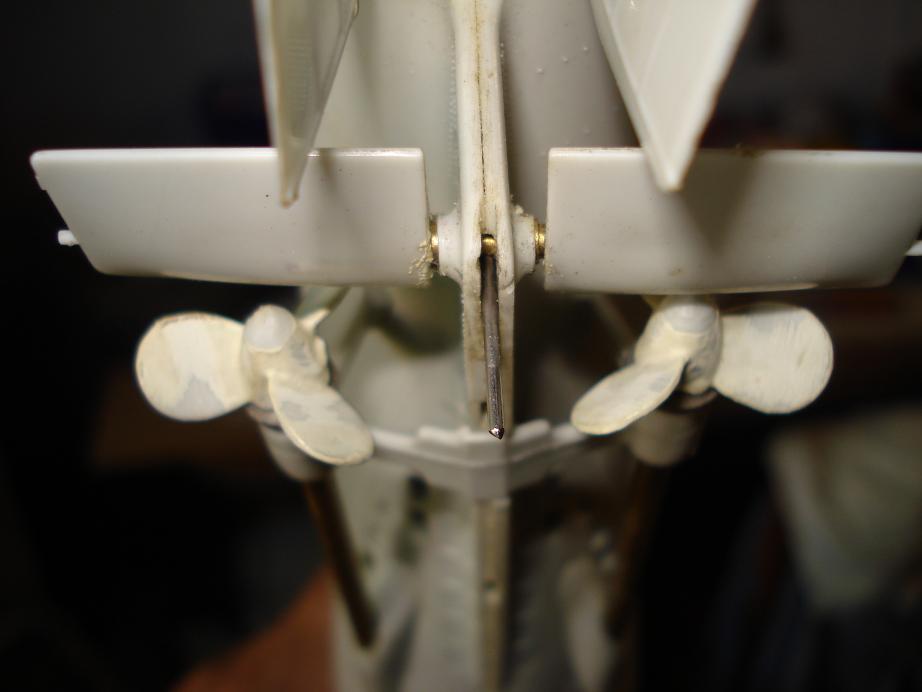
Propulsión
Como adelanté, la propulsión la brindan 2 motores de slot acoplados a engranajes con reducción 3:1. Salen del tubo de popa 2 ejes de 3mm de acero inoxidables que por medio de manguera de silicona se acoplan a los ejes de hélices. Los sellos son del mismo tipo utilizado en el Seawolf, o-rings alojados en cavidades respectivas.
Las hélices son las tripalas izquierda y derecha provistas por el kit. Las reforcé con epoxy, de todos modos desconozco su performance, veremos cuando realice las primeras pruebas. Tube que realizar calados en el fondo del casco para permitir el paso y libre giro de los ejes:
 |
 |
 |
 |
 |
 |
Amigos, hasta aquí he llegado, sigo con la construcción y espero completar el artículo cuanto antes.
Roberto Villaverde