Control
independiente de 2 motores
Por Roberto
Villaverde
Hola amigos del modelismo naval!
En esta oportunidad les presento el esquema y circuito del
sistema que diseñé (bueno, ignoro si alguien ya lo habia hecho
con anterioridad) para poder comandar en forma independiente los
2 motores de mi empujador Maciste IX.
La idea era brindarle al modelo mayor capacidad de maniobra,
aunque originalmente lo construí motorizándolo en forma
"convencional", con 2 timones, uno para cada hélice.
Obviamente, el caso ideal seria utilizar 2 variadores, uno para
cada motor, cosa que en su momento probé y realmente era un
placer, pero el costo de utilizar 2 variadores en un solo modelo
realmente es privativo, y pensé en algo más accesible y no
menos entretenido.
Pensé entonces en la posibilidad de poder interrumpir
independientemente el giro de cada motor, como así también,
invertirlo, permitiendo al modelo girar "en trompo". La
solución vino en la forma de 4 relays mecánicos, 2 para cada
motor, de manera que uno interrumpe el giro y el otro lo
invierte. Los relays son doble inversor de 2 A (amperes) ya que
el consumo del modelo es poco. Tener esto en cuenta, deben poder
soportar, cada par de relays, el consumo de cada motor! Los 2
relays son iguales, solo que para cada motor, uno va conectado
como interruptor y el otro como inversor.
Recordemos que el relay mecánico es un dispositivo
electromagnético que permite interrumpir o seleccionar el paso
de corriente entre sus contactos, y esto se logra haciendo pasar
o no corriente por otros 2 contactos que pertenecen a la bobina
interna. O podríamos decir, que el relay me permite con una
pequeña corriente eléctrica, manejar (a nivel todo-nada) una
corriente mucho mayor. Y esto es lo hago con este sistema!
Para controlar los relays uso un servo (yo usé un micro servo
porque lo tenia "de arriba", pero perfectamente si hay
lugar se puede usar uno standard), que recorre una pista simple,
con punto neutro (central) y 2 contactos a cada lado del
recorrido. Es importante que entre los 2 contactos de cada lado
no haya "pausas", ya que cada motor debe pasar de
interrumpido a invertido directamente. Esto lo desarrollaré más
adelante.
La salida del variador (uso uno comercial) no va a los motores
directamente, sino a los relays que operan como inversores, pero
pasando uno de los cables primero por el relay interruptor.
Antes de ver los esquemas, les explico la idea de funcionamiento:
en la posición central del servo, ningún relay recibe corriente
en su bobina, de manera que cada motor recibe la corriente y el
modelo avanza o retrocede, porque opera como si todo este sistema
no existiese. Supongamos muevo el servo hacia babor (izquierda)
digamos la mitad del recorrido, entonces la bobina del relay
interruptor recibe corriente y este relay interrumpe el paso,
como consecuencia, el motor de babor se para, y el modelo
gentilmente irá derivando a babor, pues solo el motor de
estribor está fucionando. Si muevo el servo hacia el extremo,
entonces el relay citado deja de recibir corriente en su bobina,
vuelve a permitir el paso, pero ahora le estamos dando corriente
a la bobina del relay inversor, y ahi es donde aparece la magia:
el motor invierte su giro, y el modelo gira como un trompo. Y
todo lo mismo para el lado de estribor, por supuesto.
Cabe destacar que esto es provechoso en tanto el empuje de cada
grupo motor-hélice sea el mismo, y cuanto más separadas estén
las hélices, mejor; de ahí el uso en empujadores, que suelen
ser bastante "mangudos".
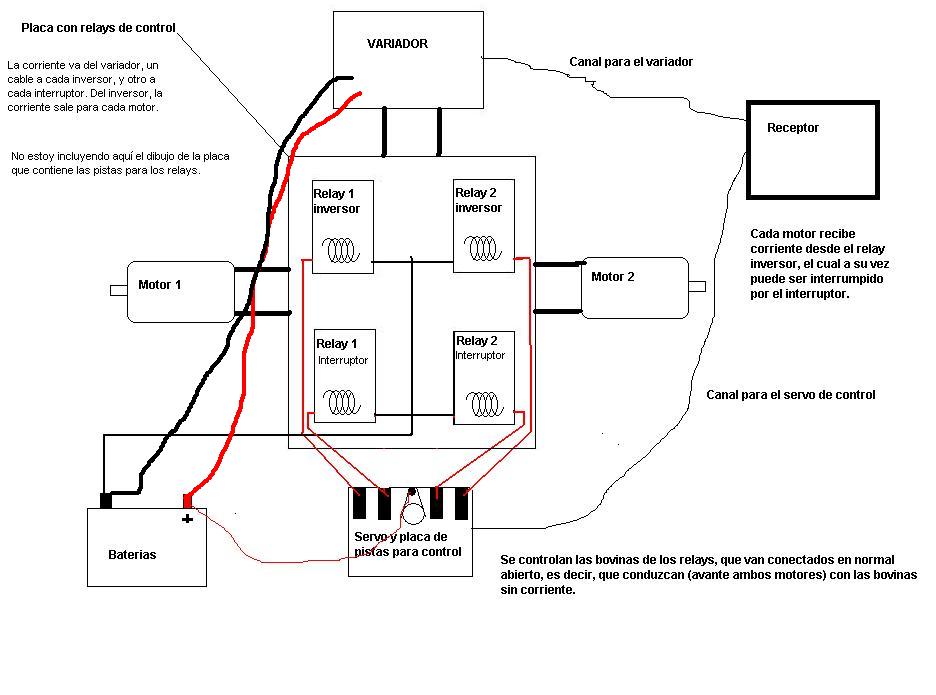
A continuación el esquema general de conexionado (click sobre la imagen para ampliar):
Admito que se ve un tanto complejo, pero no es tan así.
Como se puede ver, desde la placa de control, donde está el servo, parte 4 cables, hacia los contactos de las bobinas de los relays, llevando el positivo; el negativo va directo a cada uno de los otros contactos de bobinas. La tensión viene de la bateria al brazito del servo, al moverlo esta es conducida a la bobina deseada.
Aquí dibujé la placa de control simplificada, en realidad las pistas no están a 90 grados; lo ideal es ubicar el servo con el brazo ya construido de manera que toque el cobre, hacerlo mover de un extremo a otro varias veces para que marque el arco que recorrerá; sobre dicho arco dibujar una sola pista a cada lado de la posición neutral, y en el centro cortarla con un cutter para obtener 2 pistas a cada lado, de manera que no haya interrupciones (puntos neutros a cada lado), se entiende?
Tener en cuenta que las tensiones de las bobinas de los relays deben ser la misma que la tensión que estamos utilizando como fuente de alimentación (bateria), por ejemplo, 6 volts. Tampco hay problema si usamos relays de 5v y la bateria es de 6v. En mi caso se me complicó un poco porque ya estaba alimentando todo con un pack de 7.2v, pero para los relays usé la tensión regulada de 6 v que viene del variador.
Estoy preparando el diagrama del circuito de la placa de relays y las pistas del servo de control, cuando esté les aviso. Mientras tienen para pensarlo.
Como nota final, diré que lleva cierta práctica dominar el modelo una vez que uno siempre lo comandó con timones, pero vale la pena. Ni mencionar el completo control que se obtiene en reversa.
Saludos
Roberto Villaverde