helice de paso variable
- NUEVO!!!
para VER
COMO FUNCIONA la helice, vea el grafico con movimiento haciendo
click sobre el dibujo de abajo y se ejecutará windows media que
se lo mostrará.
Hola amigos, hace ya un tiempo leyendo la revista "radiocontrolado" encontré un articulo escrito por Claudio Bassetti que me gusto mucho, el cual hablaba de sistemas de propulsión avanzados , lo cual me animo a contarles como podemos aplicar otro sistema de propulsión poco aplicado en modelismo , pero muy practico y efectivo en los buques modernos y en modelos de vapor vivo.
Se trata de la hélice de paso variable , con este sistema tenemos varias ventajas : el motor gira a un N° de r.p.m. constante (en el caso el motor eléctrico no necesitamos un regulador de velocidad ; y para el caso de un motor de vapor no tendremos el problema de variar las r.p.m. , ya que esto se torna complejo). La otra ventaja ,y creo que la mas importante , es la regulación casi exacta de la velocidad tanto en marcha adelante como en marcha atrás. La única dificultad que considero importante para este sistema , es su construcción , para el cual vamos a necesitar un pequeño taller con torno y fresadora. La otra dificultad es el tamaño , ya que debido a razones de diseño el diámetro del núcleo de la hélice no podrá ser menor de 17 mm , ya que por debajo de esta dimensión se dificulta la construcción de algunos elementos. Hay que considerar también que el numero de palas cuanto mas mayor sea mayor será la dificultad , considerando 3 o 4 palas el ideal
DESCRIPCION DEL SISTEMA
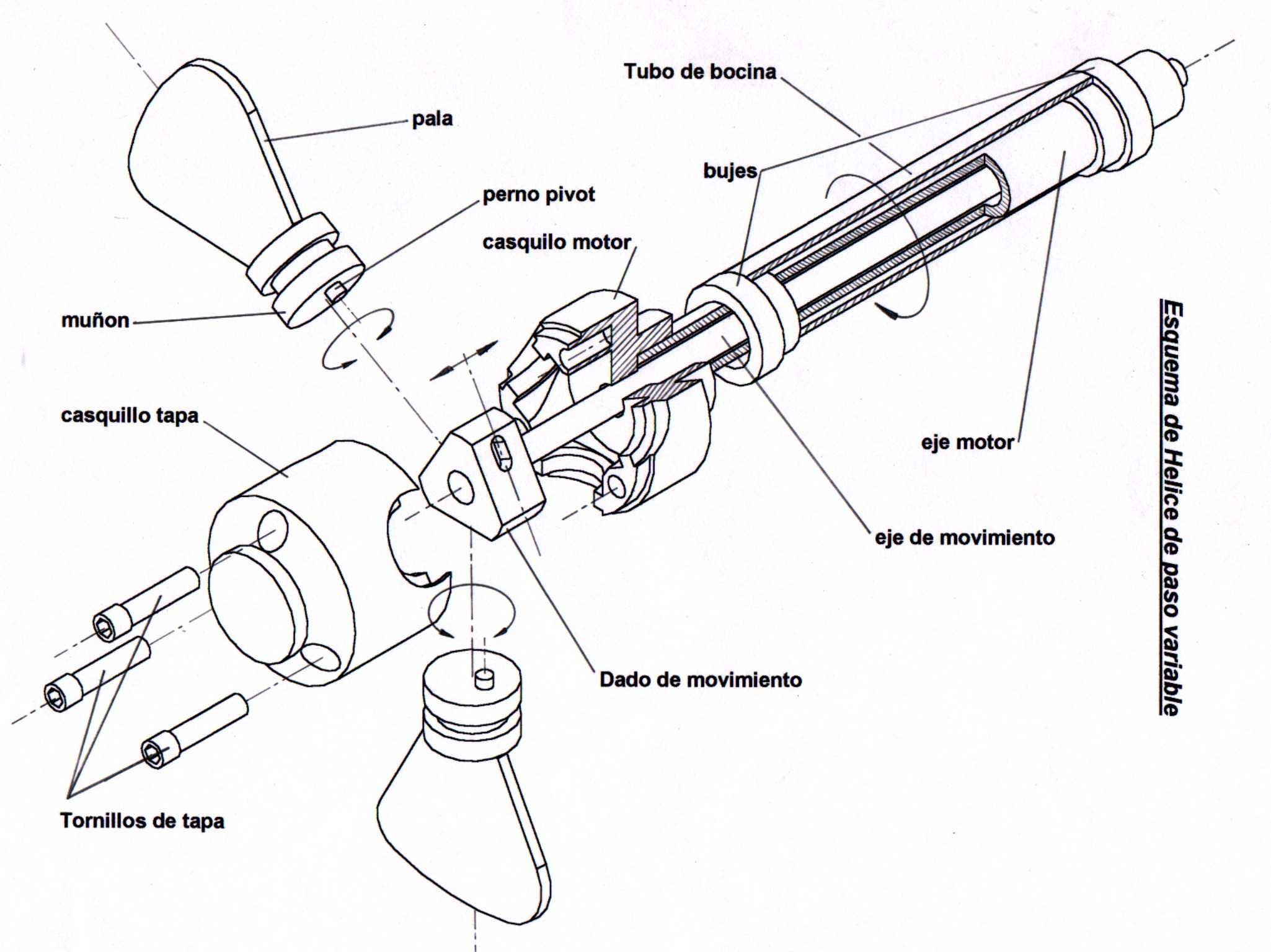
El sistema básicamente consta del giro de las palas sobre el eje de la misma , pudiendo así variar el ángulo de ataque de la pala y por consiguiente el paso de la hélice y la velocidad del modelo. Para esto necesitamos que núcleo de nuestra hélice sea hueco (casquillo tapa-casquillo motor) para poder alojar un dado de movimiento el cual al desplazarse con movimiento axial , actuara sobre la palas haciéndolas girar por medio de un perno pivot , que unido al muñón de la pala , se desplaza entro de una ranura que posee el dado de movimiento. Para el movimiento de rotación utilizaremos en eje hueco (eje motor), el cual ira roscado al casquillo motor , por dentro de este eje se desplazara otro eje (eje de movimiento) que será solidario al dado y que será el encargado de darle el movimiento al mismo.
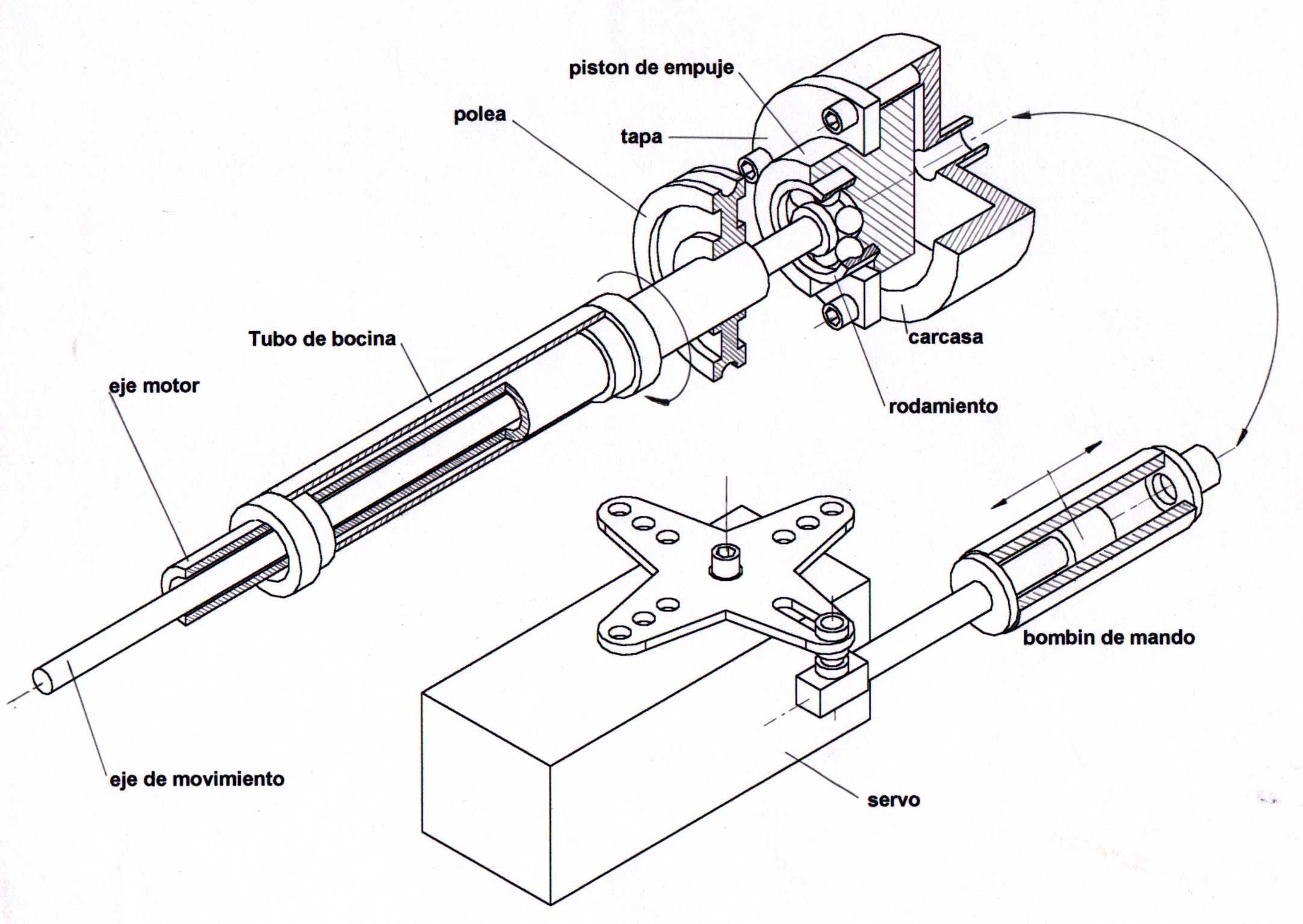
El eje motor ira montado en su respectivo tubo de bocina, a la salida del mismo tendrá una polea que será la encargada de transmitir la rotación desde el motor. Para el desplazamiento axial del eje de movimiento utilizaremos un sencillo sistema hidráulico que será comandado por un servo. La razón de esta elección se debe a que el movimiento axial del dado debe ser muy preciso , encontrándose todo el recorrido en aproximadamente 2,5 m.m. Para construir el sistema hidráulico utilizaremos el principio de un bombin de freno. Para empezar debemos convertir el movimiento del servo, utilizando el brazo del mismo calcularemos tomando como base el orificio mas alejado del centro la cuerda del arco que describe este orificio con el movimiento máximo del servo (se dispone 90° el ángulo de trabajo de un servo ) 45° por lado.Por trigonometría se desprende que la cuerda del recorrido del servo será: C = ( R . cos 45° ) . 2 siendo R el radio del brazo (distancia del centro del servo al orificio mas alejado) y el cos 45° = 0,7071 nos queda : C = R . 1,4142 C será nuestro recorrido inicial, para el calculo del sistema hidráulico conocemos dos cosas : C y el recorrido final, que como ya lo mencionamos antes es de 2,5 m.m. , y a este valor lo llamaremos F.Para la sección del pistón accionado por el servo utilizaremos un diámetro pequeño (no mayor a 6 m.m.) y con esto calcularemos la sección inicial :Si = ( P. Di ) / 4 Ahora sabemos que los volúmenes a desplazar por el pistón inicial y por pistón final son iguales tenemos : Si . C = Sf . F de esto se desprende: Sf = (Si . C ) / F siendo Sf la sección del pistón del eje de movimiento , ahora calcularemos el diámetro de dicho pistón : Df = Ö (Si . C . 4 ) / ( F . P ) Con esto ya conocemos todas las dimensiones básicas de nuestro sistema hidráulico. A la salida del eje de movimiento colocaremos un rodamiento que será el encargado de transmitir el movimiento axial del pistón final a dicho eje, el motivo de la colocación de este elemento es que el pistón solo tiene movimiento axial ; y el eje tiene movimiento axial y a su vez gira solidario a la hélice. Entre los dos pistones podemos conectar una manguera será la encargada de llevar el liquido hidráulico, a esta manguera le pondremos una llave para llenar el sistema con liquido y asegurarnos que no quede aire .
CONSTRUCCION DEL SISTEMA
Para
construir las palas , los muñones y el dado utilizaremos acero
inoxidable ; en cambio para los casquillos del núcleo y los
bujes del tubo de bocina utilizaremos bronce. Para el eje de
movimiento y los pernos pivot podemos utilizar acero plata ; para
el eje motor y el tubo de bocina podemos emplear caños de
acero inoxidable lapeados de calidad comercial. Todos los
tornillos son M2 x 0.4 “ALLEN” cabeza cilíndrica de
acero inoxidable ,el rodamiento utilizado es un SKF 623. Las
carcasas del bombin como el de empuje serán de bronce , mientras
que los pistones los haremos de acero inoxidable Todos los
detalles constructivos como así también las dimensiones reales
de todos los elementos que componen el sistema se encuentran a
disposición. Solo me resta saludarlos y buenos vientos, Diego H.
Pascualicchio.