 CAMINO HACIA
NUESTRO PROPIO MODELO
CAMINO HACIA
NUESTRO PROPIO MODELO CAMINO HACIA
NUESTRO PROPIO MODELO
Muchos modelistas, especialmente aquellos que recién comienzan y sueñan con construir un submarino, me preguntan si podrán hacerlo con una radio de dos canales. La respuesta a esa pregunta es una pequeña idea o proyecto, que resulta en un modelo (logicamente con ciertas limitaciones de alcance) apto para navegaciones en pileta y a profundidades máximas de dos metros. Por el sistema de lastre utilizado es ideal para submarinos de 60 cm. a 100 cm. de eslora y desplazamiento máximo de 4 a 5 Kg.
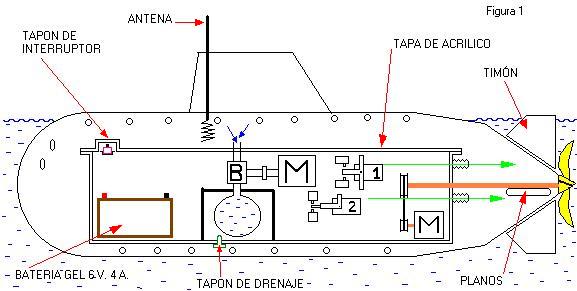
Pasaremos a describir ahora el modelo de la figura 1. Basicamente se construye por el método de libre circulación, o sea que el casco es nada mas que una carcaza con la forma deseada, de plástico o fibra de vidrio, con los suficientes orificios para permitir que entre el interior del casco y la cámara estanca circule el agua libremente. Esta se construye con planchas de plástico de alto impacto de 4 mm. de espesor y algunos refuerzos internos, y la tapa superior de acrílico de 6 mm. va abulonada con tornillos de w 3/32 o similares de bronce cada 3 cm . aproximadamente. Todo el equipamiento está contenido en esta única cámara estanca.
Justo en el centro de gravedad, colocamos el mecanismo de inmersión, que está compuesto por una bomba de engranajes (ya sea de las que se usan para trasvasar el combustible en aeromodelismo, o los clásicos "sapitos" de los automóviles. Figura 1 B. ¡Ojo!, existen tambien de paletas y centrífugas, pero éstas no sirven en este caso.

Esta bomba está conectada por un lado a un depósito flexible de goma- figura 1 C - (puede ser una cámara de pelota pequeña o similar) y por el otro directamente al agua, (debemos asegurarnos que la parte superior de la cámara esté sumergida en todo momento) se halla fijada firmemente a la tapa de acrílico y justo debajo de ella tiene una especie de taza o recipiente, con un tapón para el drenaje, en la parte inferior , que nos permite recoger, cualquier goteo que pudiera tener la bomba. Tanto el motor de la bomba como el de propulsión son del tamaño de un mabuchi 380 o similar. La batería es única, de 6 volt. tipo gel con una capacidad de 4 amp. o más.
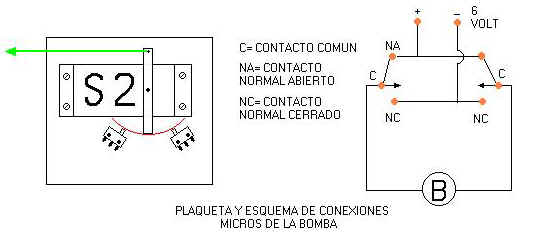
En la parte superior de la tapa de acrílico se coloca una tapa roscada que sirve para el interruptor y también para ventilar la cámara. Pero el verdadero artilugio para poder navegar con tan sólo dos canales, consiste en utilizar el canal de motor para controlar los planos de profundidad S2 - figura 1 - y el extremo superior del recorrido accionamos n pequeño microswich y la bomba aspira agua para la inmersión. En el extremo inferior la bomba invierte su giro y el agua es expulsada. Logicamente, cuando ya apenas nos hayamos sumergido, se controla la profundidad con los planos, sin llegar al extremo del recorrido - figura 3- .
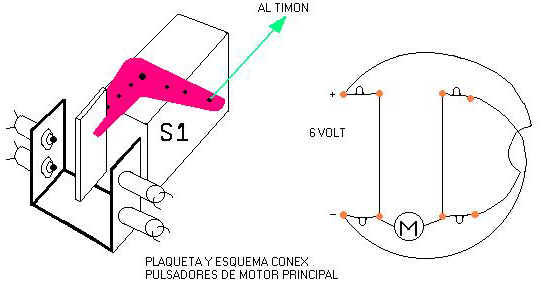
De la misma manera, los extremos de los servos del timón S1 - figura 1 - nos permitirán accionar el motor a la derecha, avante y a la izquierda, retroceso. Pero esta vez será necesario utilizar cuatro pulsadores con retención - figura 4 - para que una vez accionados sea necesario pulsarlos otra vez para detener el motor.
Logicamente, si todo este sistema se usa con un equipo de cuatro canales. Se usará un servo para timón, un servo para la plaqueta de microswich de la bomba, otro servo para los planos de profundidad y un variador de velocidad para el motor.
Saludos, Andrés Hollmann
| introducción | sumergibles | submarinos | lastre | estabilidad | seguridad |