Es la primera forma de intentar una incursión por debajo de la superficie del líquido elemento; como el título lo anticipa, en estos modelos el peso no varía durante la inmersión, o sea, se mantiene constante el Pe.
Entonces la forma de operar es la siguiente: se trata de modelos con una flotabilidad positiva (cuanto menos mejor, para poder sumergirlo con menor esfuerzo), y la forma de lograr la fuerza necesaria para la inmersión es dinámica.
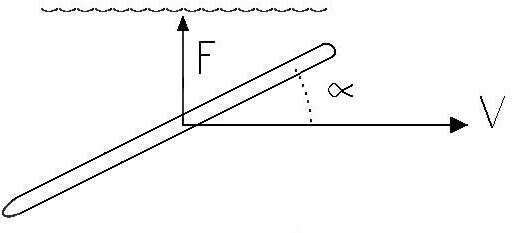
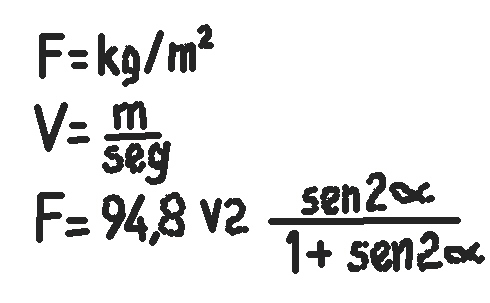
Se hecha mano a la fuerza impulsora del motor para lograr velocidad, se sobredimensionan los planos de inmersión, y estos, trabajando como verdaderas "alas" hidrodinámicas crean el empuje hacia abajo necesario; esta pequeña fórmula da una idea de la relación entre la velocidad, el ángulo de calaje y la fuerza generada por superficie plana sumergida (según artículo de la revista RCModel).
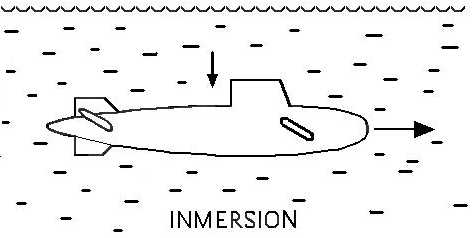
Como puede verse en la figura 1, toda la maniobra se realiza con ambos planos, delanteros y traseros trabajando juntos; éstos durante la navegación en superficie deben estar totalmente sumergidos, ser de generosas dimensiones y grueso perfil alar, además como dijimos que la flotabilidad positiva debe ser pequeña, ello se logra con una obra muerta muy liviana, ya que cada gramo de peso por encima de la línea de flotación requiere del mismo valor de flotabilidad positiva para llegar a la línea de flotación e idéntica fuerza para hundirlo.
Figura 1:
Estos modelos solo pueden sumergirse estando en movimiento, ya que detenido no existe fuerza hidrodinámica y necesitan de una considerable velocidad.
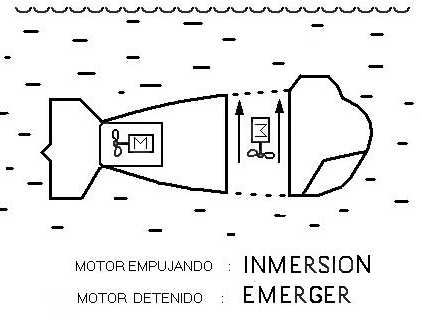
Para solventar este inconveniente existe un método también hidrodinámico que se basa en el trabajo de un motor eléctrico empujando hacia abajo para la inmersión.
Se presta muy bien para modelos del tipo científico, de rescate o experimentales como el ALVIN, u otros.
De esta manera se pueden hacer modelos controlados totalmente por motores sin planos de mando.
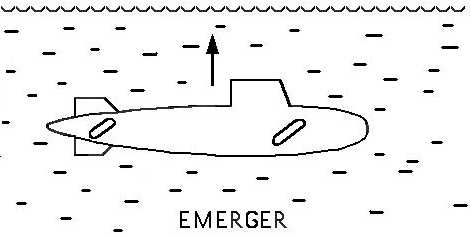
Figura 2
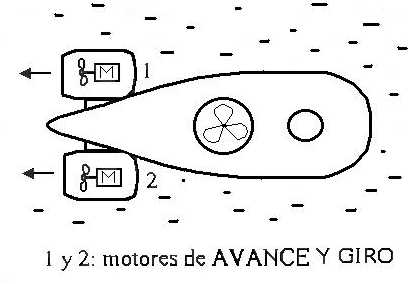
A pesar de las desventajas, los submarinos de desplazamiento fijo tienen una a favor: SU SENCILLEZ, ya que basta con un compartimento estanco para todo el equipo y ningún mecanismo presurizado. Requieren tres canales de radio para funcionar.
| introducción | submarinos | lastre | estabilidad | seguridad | el modelo |