 FACTORES DE
ESTABILIDAD
FACTORES DE
ESTABILIDAD FACTORES DE
ESTABILIDAD
Ya se han descripto los principales sistemas para hacer operativo un submarino, desde los más elementales hasta los más complejos. Como curiosidad diremos que uno de ellos, en el momento de escribir estas notas, era sólo de uso por parte de algunos aficionados entre los cuales me cuento (pág. 8, fig. 8), es decir el sistema con compresor de aire, y que actualmente se comercializa en forma de kits, lo cual demuestra que no estábamos equivocados al elegirlo.
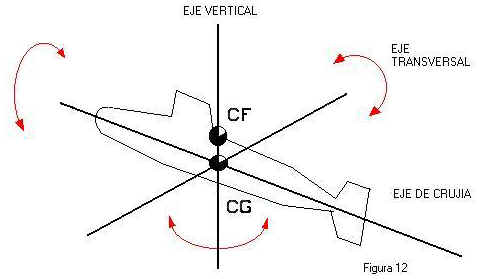
Pero no todo termina en la elección de uno u otro sistema de inmersión. Ese es desde luego el primer paso y allí debemos tener en cuenta el tamaño del modelo, tipo, materiales de los que disponemos y por supuesto el costo de cada uno, para luego pasar a considerar algunos factores mas que hacen a la funcionalidad de nuestro modelo. Por ejemplo, es necesario que el submarino mantenga una postura horizontal, en el sentido del eje transversal (fig. 12), para garantizar una trayectoria a igual profundidad; y una postura vertical en el eje de crujía para evitar que nuestro modelo de una vuelta de campana al actuar el torque del motor. Por el contrario, el equilibrio en el eje vertical sólo afecta el rumbo a seguir y generalmente se controla con los timones verticales.
El equilibrio en el eje transversal se logra haciendo que coincidan en una misma línea vertical el centro de gravedad CG del modelo y el centro de flotavilidad CF, dos fuerzas opuestas y equilibradas (fig. 13).
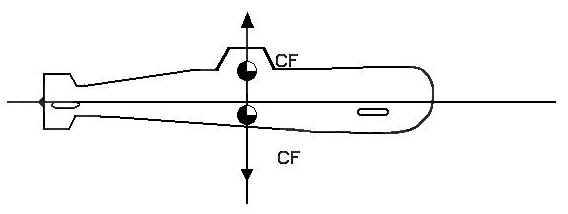
Al ver el dibujo comprenderán la dificultad de centrar estas dos fuerzas si se dispone de dos o más lastres. Una solución sencilla es dotar a nuestro modelo de un sólo lastre situado perfectamente sobre el CG del submarino. Cuando estas dos fuerzas coinciden tanto en flotación (lastres vacíos) como en inmersión (lastres llenos), el modelo mantendrá un perfecta postura horizontal. Las correcciones se pueden hacer de dos maneras según sea necesario: desplazando elementos que corran el CG de su posición (plomo, baterías, etc), o colocando elementos que cambien de lugar el CF (elementos con flotabilidad positiva: trozos de telgopor, cámaras estancas, etc.). Por el contrario, el equilibrio en el eje longitudinal (de crujía) parece sencillo de alcanzar ya que para que éste sea mayor sólo basta aumentar la distancia en sentido vertical entre el CF y el CG. (Fig. 14).
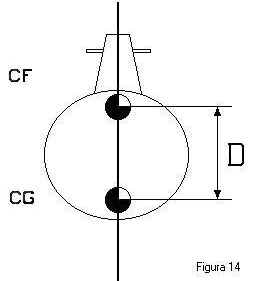
Si la distancia entre centros (D) es pequeña, el momento adrizante también lo es, y nuestro modelo puede dar vueltas sobre si mismo ante la torsión del motor, especialmente si está en ángulo de inmersión o emersión. Para aumentarlo se colocan los elementos más pesados lo más bajo posible, y aquellos que otorgan flotabilidad positiva lo más arriba posible.
No olvidemos que en flotación, todos los elementos que se encuentren por encima de la línea de flotación normal (aún aquellos que en inmersión tengan flotabilidad positiva) actuarán como generadores de peso. Por ello para facilitar el equilibrio es desable que todo aquello que se halle por encima de la línea de flotación sea lo más liviano posible y de flotación casi neutra. Ya en navegación a máxima velocidad interviene lo que llamamos "equilibrio dinámico".
En un submarino moderno con el eje motor alineado en el centro de éste, sólo puede alterar su equilibrio la resistencia hidrodinámica de la vela o quiosco (fig. 15).
Debido a ella, el centro del área lateral (CAL) queda por encima de la línea de empuje, originando un par de desequilibrio que sumado a otras fuerzas, debidas a la diferente velocidad de las venas fluídas por encima y por debajo del modelo, tienden a subir la proa del modelo.
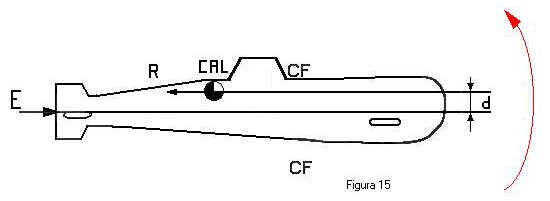
Naturalmente, esto se corrige con la posición de los planos de profundidad, creando una fuerza hacia abajo que reestablezca el equilibrio. Este efecto es mayor en un submarino del tipo de los de la II GM, que tienen los ejes motrices desplazados hacia abajo del eje del casco. Pero allí además de los planos también se pueden inclinar los ejes hacia abajo para aumentar el par de equilibrio.
Como mantener este equilibrio en forma manual obliga a continuas correcciones, se puede recurrir a algunos sistemas de "ayuda automática de equilibrio". Así, para evitar que se pierda el equilibrio en el eje transversal, lo cual si el submarino no está visible y la profundidad es suficiente puede ocasionar que nuestro submarino realice un rizo hacia arriba, clavándose en el fondo o exediendo la profundidad de seguridad, se ha recurrido a varios artilugios.
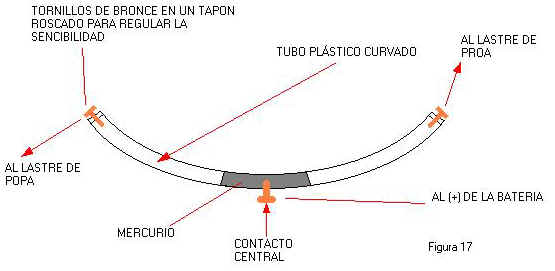
Por ejemplo, si nuestro modelo dispone de dos lastres, un tubo curvo con cierta cantidad de mercurio hace las veces de sensor de inclinación y conecta uno u otro lastre según sea la inclinación hacia proa o popa actuando ya sea las bombas, válvulas de gas o motores de los émbolos, según sea el sistema elegido.
También se han usado giróscopos para controlar los planos de profundidad, pero según las pruebas por mí realizadas, el resultado es muy pobre, ya que el giróscopo produce la corrección durante breves instantes después del desequilibrio, mientras que la velocidad del movimiento del modelo es mucho más lenta. No olvidemos que éstos han sido hechos para controlar el rotor de cola de los helicópteros, que responden en forma casi instantánea a las correcciones.
En mi primer modelo desarrollé un sistema que controla los planos traseros, con un servo esclavo de un péndulo, que ante cualquier variación de la línea horizontal produce una corrección en los planos en forma automática e independiente de la radio.
Actualmente, la firma "SUBTECH" (112, Primrose Lane Brick, New Jersey, 08724), comercializa un sistema similar denominado " A PC-1", aunque actúa sobre un canal de la radio, lo cual permite correcciones en navegación. Su estabilidad no es muy brillante y tiende a autooscilar, pero aún así puede cumplir su cometido. Estos controles automáticos se aplican sobre los planos traseros, ya que los delanteros se reservan para un control manual directo. Con esta disposición (fig. 18) se logra que el modelo siga la orden dada a los planos delanteros, y en forma automática para los planos traseros, manteniendo la horizontalidad.

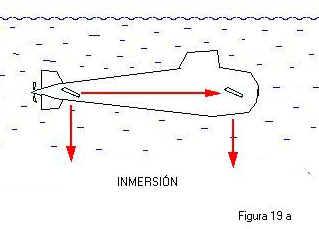
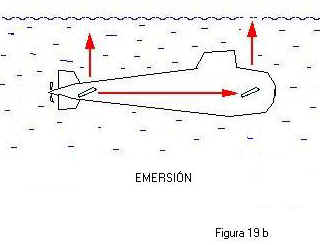
Si se insiste en la orden de descenso con los planos delanteros, la corrección automática de los traseros harán que el submarino descienda en forma horizontal (y lo mismo si la orden es de ascenso). Si no deseamos utilizar éstos mecanismos, ambos planos deberán trabajar en conjunto, para producir el ascenso y descenso en forma horizontal (figs. 19a y 19b).
| introducción | sumergibles | submarinos | lastre | seguridad | el modelo |