
SUBMARINOS DE DESPLAZAMIENTO VARIABLE
Es naturalmente lo que más se aproxima a una maniobra real. Salvando las distancias, variar el desplazamiento significa variar el Pe del modelo, lográndose la inmersión ya sea con un incremento del peso o una disminución del volumen o ambas variables combinadas, a la inversa se logra la maniobra de emerger. Respecto a los sistemas prácticos veremos algunos de los más usados:
Sistema de émbolo o émbolos:
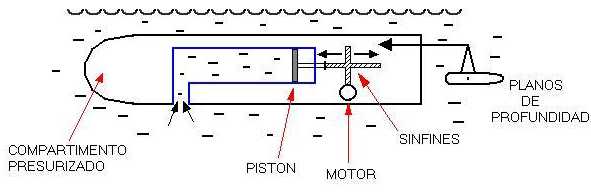
Es el más antiguo de los métodos -ver fig. 3-. Basicamente se trata de un pistón accionado a través de una gran reducción por un motor eléctrico, una de cuyas caras está en contacto con el agua y la otra con el aire del interior del compartimento estanco. La hermeticidad de éste debe ser mejor que en los casos anteriores, ya que debe soportar presiones y depresiones originadas por el desplazamiento del émbolo. La presión del agua actuando sobre la cara activa del pistón origina grandes fuerzas que deben ser vencidas con la reducción mecánica. Ello implica que se deben usar motores relativamente grandes (tipo mabuchi 540) para el accionamiento.
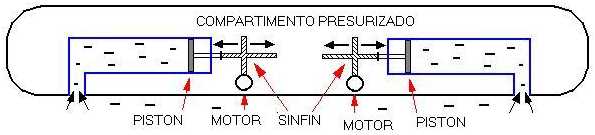
Si se utiliza un émbolo en proa y otro en popa se puede prescindir de los planos de profundidad para el control de la estabilidad en el eje transversal. Se maniobra con 4 canales de radio: motor, timón, émbolo de proa y émbolo de popa. Demás está decir que el sello entre el cilindro y el pistón debe ser perfecto pero al mismo tiempo de muy liviano deslizamiento para no originar elevados comsumos; recordemos respecto a las presiones, que a 3 metros de profundidad tenemos una presión de 300gr/cm2, si trabajamos con un pistón de 5 cm de diámetro tendremos una fuerza a vencer de 5,89 kg.!, y para desalojar ½ lt. de agua deberá recorrer una carrera de 26 cmt! aproximadamente. Como resultado: Grandes baterías o muy pequeña autonomía.
Figura 3
Sin embargo uno de los primeros kits realmente funcionales y todavía en venta desde hace ya muchos años, es de Alexander Engel KG de West Germany, que fuera importado en Inglaterra por SUN LANE Enginering Co. LTD.; se basaba en éste sistema utilizando 2 émbolos.
Figura 4
Sistema con bombas:
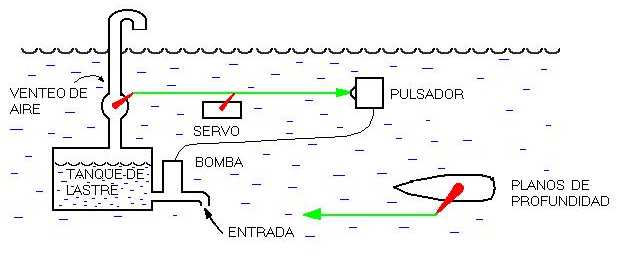
Se basa en bombas reversibles generalmente de paletas o engranajes del tipo como las que se usan para el trasvase de combustible en aeromodelismo o similares. También sirven algunos tipos de las que se usan para lavar parabrisas en los autos (sapitos) y una válvula para el venteo que se acciona con el mismo servo que actúa el interruptor de la bomba. -fig 5-
Abriendo el venteo, el lastre se inunda por propia presión del agua, pero se puede acelerar accionando la bomba en reversa.
Cuando el submarino ya se ha sumergido "casi" totalmente, se cierra el venteo y detiene la bomba; el resto de la inmersión se logra con los planos de profundidad, con el submarino avanzando con los motores. Así para emerger, bastará con encender la bomba, la cual sacará algo de agua haciendo un ligero vacío en el poco aire del lastre, y luego cuando emerge a la superficie el snorkel (o sea la toma de la válvula de venteo), podremos abrir ésta y continuar bombeando el agua hacia afuera. Requiere de 4 canales de radio: motor, timón, bomba de agua y válvula, y planos de inmersión.
Como defecto mayor, diremos que si llegamos a inundar demasiado los lastres, o si no cierra bien la válvula de venteo, quedará el modelo irremediablemente en el fondo.
Figura 5
Sistema con gases a presión:
Se puede decir sin equivocarse, que es el sistema más difundido. El 80% de los modelos lo emplean en alguna de sus variantes, que básicamente son dos bien definidas: Con gases licuados, Freón, Butano, etc., baja presión de trabajo, bajo volumen de almacenamiento y gran autonomía. Ejemplo: 50 ml de freón, o sea aprox. 90 gr, desplazan 13 lts.; o sea que si el lastre es de 500 mlt podremos hacer más de 20 inmerciones! con una carga.
Y con gases a alta presión CO2, aire, etc., éstos requieren un volumen mayor de almacenaje, y el manejo de la alta presión requiere de técnicas especiales.
El sistema trabaja de la siguiente manera:
Figura 6
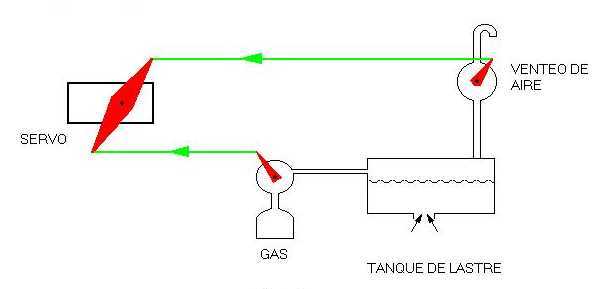
Un servo controla en un sentido la apertura de la válvula de venteo para inundar por propia presión del agua los lastres, y en otro sentido cierra el venteo y abre la válvula del gas para desalojar el agua por la boca que se halla siempre abierta. La operación es sumamente sencilla, de allí la popularidad del sistema. El tema se complica un poco a la hora de elegir el gas. El Freón era perfecto hasta que se descubrió el efecto que producen los fluorocarbonados y su liberación sobre la capa de ozono, sin recupero en el sistema, teniendo muchas objeciones, el Butano no tiene éste defecto, pero debe manejarse con precaución en su carácter explosivo en combinación con el aire. El aire comprimido requiere de grandes volúmenes y presiones del orden de los 7 kg/cm para realmente tener autonomía suficiente, siempre es más difícil manejar presiones mayores, y en el caso del CO2 son mayores aún aunque se reduce bastante el volúmen.
Para manejar la elevada presión de la carga de CO2 (aprox. 56Kg/cm), se requiere reducir ésta con un regulador de presión para su manejo -fig.7-.
A pesar de ello es un sistema que se está utilizando mucho en EEUU, ya que existen cartuchos descartables de muy bajo costo, es inerte y no deteriora "O" rings u otras partes de goma, no requiere mucho mantenimiento, no es inflamable y no deteriora la capa de ozono.
Figura 7
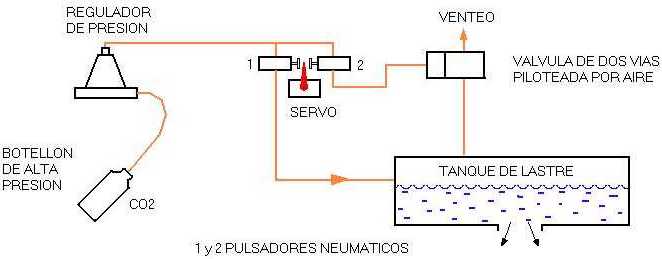
Esquema según Marshall D.Clark, editor del Subcommittee Report
Para el control presiso del volúmen con presiones muy altas, son ideales las válvulas solenoide, o sea válvulas controladas directamente por corriente.
Aún con todos sus defectos, los sistemas comerciales lo emplean en su mayoría. La firma 32nd. Parallel posee varios modelos con este sistema y optativamente el de bomba. También Subtech y Entech Products.
Sistema con circuito cerrado:
Para mejorar la ineficiencia de los sistemas de émbolo y aumentar la seguridad, veremos un sistema desarrollado por Nick Burge -fig. 8- que opera de la siguiente manera: el aire almacenado a baja presión (aprox. 20 lbs) en un depósito, es liberado en el tanque de lastre para evacuar el agua, con una válvula solenoide, y se efectúa la maniobra de emerger. Para la inmersión, se enciende un pequeño compresor que toma el aire del lastre y lo comprime en el depósito o pulmón pasando por una válvula de retención, para evitar cualquier retorno de aire al detener el compresor. Para evitar la entrada de agua en el compresor y resto del circuito, se instala un sensor de agua que detiene éste tan pronto el líquido llega a un nivel cercano a la boca de aspiración, así nuevamente este aire comprimido puede ser liberado a voluntad para regular la inmersión.
Figura 8

Se necesita de por lo menos cuatro canales de radio, como siempre: motor, timón, planos de profundidad y mediante el cuarto canal se controlan en un sentido el compresor y en el otro la válvula solenoide. Por ahora no conocemos de algún kit comercial que utilice este sistema, aunque sí varios modelistas en el mundo lo han adoptado, por su gran autonomía y muy presiso control del lastre.
Hasta aquí hemos visto los sistemas más comunes a que recurrimos para el gobierno de la cota de profundidad en nuestros modelos. Veremos en adelante algunas variantes prácticas de estos sistemas que pretenden solucionar y mejorar o simplificar algunos problemas de cada sistema en particular, y también un sistema ensayado por mí para pequeños modelos.
| introducción | sumergibles | lastre | estabilidad | seguridad | el modelo |