 SISTEMAS DE
SEGURIDAD - PENETRACION DE LAS ONDAS
SISTEMAS DE
SEGURIDAD - PENETRACION DE LAS ONDAS SISTEMAS DE
SEGURIDAD - PENETRACION DE LAS ONDAS
Llegando a este punto de nuestras charlas sobre modelos de submarinos, algunos de ustedes ya habrán elegido el sistema de inmersión, la ubicación de los componentes, el modelo a reproducir, etc., y creo entonces oportuno tocar entre otros el tema del equipo de radio control y la gran confusión que genera la bibliografía existente respecto a la penetración y alcance de las ondas hertzianas debajo de la superficie del agua.
De acuerdo a mi experiencia personal puedo decirles lo siguiente: la penetración de las ondas es casi nula en agua salada, pero en agua dulce es posible el control seguro hasta profundidades de 4 mts. o más, a corta distancia y con alcance de 20 a 100 mts. según la profundidad de inmersión. Siempre, desde luego, con equipos de 4 canales o más, ya que éstos tienen salidas de potencia en antema del orden de los 1000 mw y gran sensibilidad del receptor (2uv). Los equipos de 2 canales sólo sirven para su uso en pequeñas piletas, debido a su menor potencia (aprox. 500mw), menor sensibilidad del receptor (3 a 5 nv) y desde luego menor alcance.
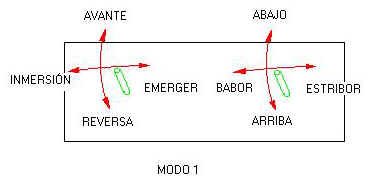
También en teoria las frecuencias bajas (27 mhz, etc.) se absorven menos que las altas (75 mhz) aunque esta diferencia es pequeña. Respecto a la ubicación de los mandos en el equipo transmisor, desde luego está siempre sujeta a la comodidad personal, pero también a la funcionalidad; debido a ello se usa una configuración muy similar a la de un aeromodelo en los dos modos.
En el modo 1 tenemos en la mano derecha el control total del movimiento dinámico en los dos ejes principales, babor y estribor con el timón, arriba y abajo con los planos de profundidad (fig. 20) y en la mano izquierda hacia arriba: motor avante, hacia abajo: motor en reversa. Con el movimiento lateral de este stik podemos comandar lastres; por ej.: Izquierda: inmersión, derecha: emersión.
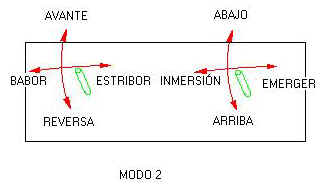
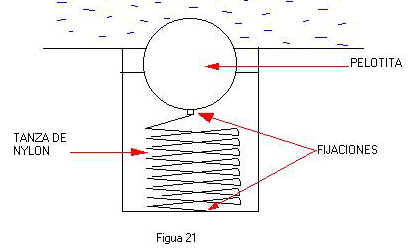
En el modo 2 de manejo, cambia de lugar la ubicación del mando de timón, que se pasa a la mano izquierda y por ende el mando de los lastres pasa a la mano derecha. También referido a la radio, y para minimizar los problemas que ocasionaría al salirnos del alcance, cosa que puede ocurrir facilmente, se recurre a algunos artilugios electrónicos denominados FAIL SAFE. La función es la siguiente: detectar la ausencia de señal de radio, en caso de que ello ocurra, y actuar sobre algún mecanismo que permita emerger de inmediato (por ej.: liberando aire en los lastres) con lo cual se debe recuperar la señal y el control. Algunos equipos modernos de alta gama ya poseen esta protección y generalmente se puede programar que servo y como actuará en caso de falla. En los equipos clásicos, es necesario conectar un circuito electrónico a la salida de un canal, para detectar esa falla de señal y actuar por ejemplo una válvula solenoide para soplar los lastres. Otro probable problema lo constituye el hecho de que nuestro modelo por alguna causa quede sumergido, atorado en algún objeto, sin baterías, o simplemente inundado y quizás en aguas de escasa o nula visibilidad. Demás está decir que puede resultar casi imposible encontrarlo y menos aún recuperarlo. Un método sencillo de seguridad, consiste en sujetar al modelo una tanza de nylon de longitud adecuada a la profundidad, con el otro extremo fijado a una pelotita de ping-pong. Antes de la inmersión, esta pelotita se fijará en un sitio adecuadoy preestablecido, con pasta de jabón. Se dejará secar y listo! (Fig. 21). Si la inmersión se prolonga mas allá de un tiempo probado, el jabón se disuelve, la pelotita se libera y sale a flote unida al modelo por la tanza, marcándonos la posición del naufragio.
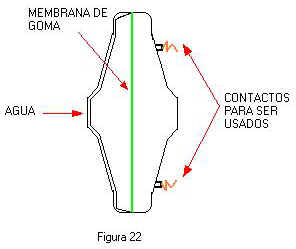
Nuestro tercer problema se presenta cuando navegamos en sitios de profundidad desconocida. Todo modelo tiene un límite de resistencia estructural, mas allá del cual, las fugas comienzan a acrecentarse primero, y luego directamente puede llegar a colapsarse en los puntos o superficies más débiles. Como vimos anteriormente, cuando estamos al límite de tener flotabilidad positiva o negativa, si ésta se supera, el descenso se produce muy rapidamente; para evitar que se supere la profundidad máxima es necesario que en ese momento algún mecanismo automático actúe sobre los lastres, para inmediatamente darle flotabilidad positiva. Para ésta función, existen muchos mecanismos, desde los más sencillos a los más sofisticados, citaremos aquí a dos de los primeros. Las máquinas de lavar ropa modernas, llevan incorporado un sensor de presión para detener el llenado del mismo con agua. Este se consigue en las casas de repuestos de electrodomésticos, su costo no es muy elevado y consta de una membrana de goma sintética y un contacto eléctrico. La membrana tiene una cara en contacto con el agua (fig. 22) y la otra al aire del interior del compartimento estanco, con un microswich.
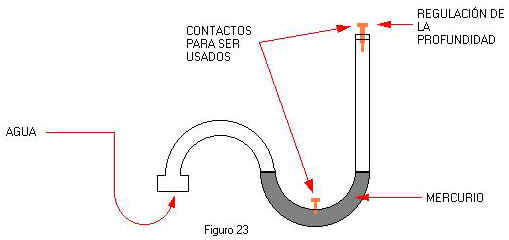
Otro mecanismo sencillo lo constituye un simple tubo en "U" con mercurio y un par de contactos eléctricos, uno de los cuales es regulable para variar la profundidad a la cual se cerrará el contacto con el mercurio; por supuesto lo podemos construir nosotros mismos.
Todo lo descripto, puede parecer algo complejo pero no debe desanimarlos, todo es cuestión de comenzar y paso a paso la madeja se irá destejiendo, les aseguro que un submarino es un navegable muy especial y compenzará con creces los esfuerzos técnicos para ponerlo en funcionamiento.
| introducción | sumergibles | submarinos | lastre | estabilidad | el modelo |